Pytorch DataLoader
生信小兔 人气:0在Pytorch中,torch.utils.data中的Dataset与DataLoader是处理数据集的两个函数,用来处理加载数据集。通常情况下,使用的关键在于构建dataset类。
一:dataset类构建。
在构建数据集类时,除了__init__(self),还要有__len__(self)与__getitem__(self,item)两个方法,这三个是必不可少的,至于其它用于数据处理的函数,可以任意定义。
class dataset:
def __init__(self,...):
...
def __len__(self,...):
return n
def __getitem__(self,item):
return data[item]正常情况下,该数据集是要继承Pytorch中Dataset类的,但实际操作中,即使不继承,数据集类构建后仍可以用Dataloader()加载的。
在dataset类中,__len__(self)返回数据集中数据个数,__getitem__(self,item)表示每次返回第item条数据。
二:DataLoader使用
在构建dataset类后,即可使用DataLoader加载。DataLoader中常用参数如下:
1.dataset:需要载入的数据集,如前面构造的dataset类。
2.batch_size:批大小,在神经网络训练时我们很少逐条数据训练,而是几条数据作为一个batch进行训练。
3.shuffle:是否在打乱数据集样本顺序。True为打乱,False反之。
4.drop_last:是否舍去最后一个batch的数据(很多情况下数据总数N与batch size不整除,导致最后一个batch不为batch size)。True为舍去,False反之。
三:举例
兔兔以指标为1,数据个数为100的数据为例。
import torch
from torch.utils.data import DataLoader
class dataset:
def __init__(self):
self.x=torch.randint(0,20,size=(100,1),dtype=torch.float32)
self.y=(torch.sin(self.x)+1)/2
def __len__(self):
return 100
def __getitem__(self, item):
return self.x[item],self.y[item]
data=DataLoader(dataset(),batch_size=10,shuffle=True)
for batch in data:
print(batch)当然,利用这个数据集可以进行简单的神经网络训练。
from torch import nn
data=DataLoader(dataset(),batch_size=10,shuffle=True)
bp=nn.Sequential(nn.Linear(1,5),
nn.Sigmoid(),
nn.Linear(5,1),
nn.Sigmoid())
optim=torch.optim.Adam(params=bp.parameters())
Loss=nn.MSELoss()
for epoch in range(10):
print('the {} epoch'.format(epoch))
for batch in data:
yp=bp(batch[0])
loss=Loss(yp,batch[1])
optim.zero_grad()
loss.backward()
optim.step()ps:下面再给大家补充介绍下Pytorch中DataLoader的使用。
前言
最近开始接触pytorch,从跑别人写好的代码开始,今天需要把输入数据根据每个batch的最长输入数据,填充到一样的长度(之前是将所有的数据直接填充到一样的长度再输入)。
刚开始是想偷懒,没有去认真了解输入的机制,结果一直报错…还是要认真学习呀!
加载数据
pytorch中加载数据的顺序是:
①创建一个dataset对象
②创建一个dataloader对象
③循环dataloader对象,将data,label拿到模型中去训练
dataset
你需要自己定义一个class,里面至少包含3个函数:
①__init__:传入数据,或者像下面一样直接在函数里加载数据
②__len__:返回这个数据集一共有多少个item
③__getitem__:返回一条训练数据,并将其转换成tensor
import torch
from torch.utils.data import Dataset
class Mydata(Dataset):
def __init__(self):
a = np.load("D:/Python/nlp/NRE/a.npy",allow_pickle=True)
b = np.load("D:/Python/nlp/NRE/b.npy",allow_pickle=True)
d = np.load("D:/Python/nlp/NRE/d.npy",allow_pickle=True)
c = np.load("D:/Python/nlp/NRE/c.npy")
self.x = list(zip(a,b,d,c))
def __getitem__(self, idx):
assert idx < len(self.x)
return self.x[idx]
def __len__(self):
return len(self.x)
dataloader
参数:
dataset:传入的数据
shuffle = True:是否打乱数据
collate_fn:使用这个参数可以自己操作每个batch的数据
dataset = Mydata() dataloader = DataLoader(dataset, batch_size = 2, shuffle=True,collate_fn = mycollate)
下面是将每个batch的数据填充到该batch的最大长度
def mycollate(data):
a = []
b = []
c = []
d = []
max_len = len(data[0][0])
for i in data:
if len(i[0])>max_len:
max_len = len(i[0])
if len(i[1])>max_len:
max_len = len(i[1])
if len(i[2])>max_len:
max_len = len(i[2])
print(max_len)
# 填充
for i in data:
if len(i[0])<max_len:
i[0].extend([27] * (max_len-len(i[0])))
if len(i[1])<max_len:
i[1].extend([27] * (max_len-len(i[1])))
if len(i[2])<max_len:
i[2].extend([27] * (max_len-len(i[2])))
a.append(i[0])
b.append(i[1])
d.append(i[2])
c.extend(i[3])
# 这里要自己转成tensor
a = torch.Tensor(a)
b = torch.Tensor(b)
c = torch.Tensor(c)
d = torch.Tensor(d)
data1 = [a,b,d,c]
print("data1",data1)
return data1
结果:
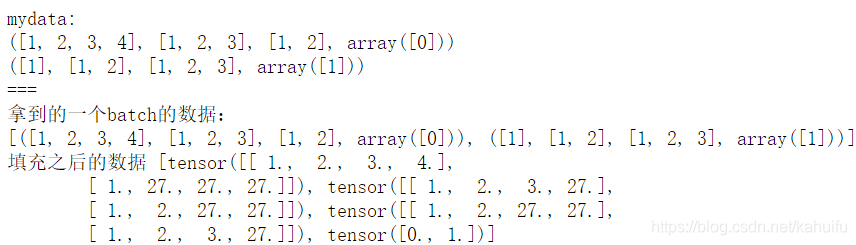
最后循环该dataloader ,拿到数据放入模型进行训练:
for ii, data in enumerate(test_data_loader):
if opt.use_gpu:
data = list(map(lambda x: torch.LongTensor(x.long()).cuda(), data))
else:
data = list(map(lambda x: torch.LongTensor(x.long()), data))
out = model(data[:-1]) #数据data[:-1]
loss = F.cross_entropy(out, data[-1])# 最后一列是标签
写在最后:建议像我一样刚开始不太熟练的小伙伴,在处理数据输入的时候可以打印出来仔细查看。
加载全部内容