PyTorch torch.utils.data.DataLoader
进击的程小白 人气:0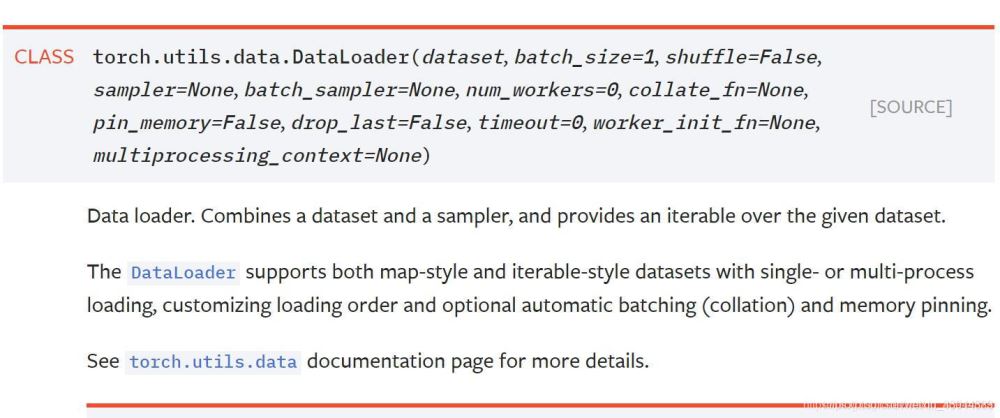
1、dataset:(数据类型 dataset)
输入的数据类型,这里是原始数据的输入。PyTorch内也有这种数据结构。
2、batch_size:(数据类型 int)
批训练数据量的大小,根据具体情况设置即可(默认:1)。PyTorch训练模型时调用数据不是一行一行进行的(这样太没效率),而是一捆一捆来的。这里就是定义每次喂给神经网络多少行数据,如果设置成1,那就是一行一行进行(个人偏好,PyTorch默认设置是1)。每次是随机读取大小为batch_size。如果dataset中的数据个数不是batch_size的整数倍,这最后一次把剩余的数据全部输出。若想把剩下的不足batch size个的数据丢弃,则将drop_last设置为True,会将多出来不足一个batch的数据丢弃。
3、shuffle:(数据类型 bool)
洗牌。默认设置为False。在每次迭代训练时是否将数据洗牌,默认设置是False。将输入数据的顺序打乱,是为了使数据更有独立性,但如果数据是有序列特征的,就不要设置成True了。
4、collate_fn:(数据类型 callable,没见过的类型)
将一小段数据合并成数据列表,默认设置是False。如果设置成True,系统会在返回前会将张量数据(Tensors)复制到CUDA内存中。
5、batch_sampler:(数据类型 Sampler)
批量采样,默认设置为None。但每次返回的是一批数据的索引(注意:不是数据)。其和batch_size、shuffle 、sampler and drop_last参数是不兼容的。我想,应该是每次输入网络的数据是随机采样模式,这样能使数据更具有独立性质。所以,它和一捆一捆按顺序输入,数据洗牌,数据采样,等模式是不兼容的。
6、sampler:(数据类型 Sampler)
采样,默认设置为None。根据定义的策略从数据集中采样输入。如果定义采样规则,则洗牌(shuffle)设置必须为False。
7、num_workers:(数据类型 Int)
工作者数量,默认是0。使用多少个子进程来导入数据。设置为0,就是使用主进程来导入数据。注意:这个数字必须是大于等于0的,负数估计会出错。
8、pin_memory:(数据类型 bool)
内存寄存,默认为False。在数据返回前,是否将数据复制到CUDA内存中。
9、drop_last:(数据类型 bool)
丢弃最后数据,默认为False。设置了 batch_size 的数目后,最后一批数据未必是设置的数目,有可能会小些。这时你是否需要丢弃这批数据。
10、timeout:(数据类型 numeric)
超时,默认为0。是用来设置数据读取的超时时间的,但超过这个时间还没读取到数据的话就会报错。 所以,数值必须大于等于0。
11、worker_init_fn(数据类型 callable,没见过的类型)
子进程导入模式,默认为Noun。在数据导入前和步长结束后,根据工作子进程的ID逐个按顺序导入数据。
对batch_size举例分析:
"""
批训练,把数据变成一小批一小批数据进行训练。
DataLoader就是用来包装所使用的数据,每次抛出一批数据
"""
import torch
import torch.utils.data as Data
BATCH_SIZE = 5
x = torch.linspace(1, 11, 11)
y = torch.linspace(11, 1, 11)
print(x)
print(y)
# 把数据放在数据库中
torch_dataset = Data.TensorDataset(x, y)
loader = Data.DataLoader(
# 从数据库中每次抽出batch size个样本
dataset=torch_dataset,
batch_size=BATCH_SIZE,
shuffle=True,
# num_workers=2,
)
def show_batch():
for epoch in range(3):
for step, (batch_x, batch_y) in enumerate(loader):
# training
print("steop:{}, batch_x:{}, batch_y:{}".format(step, batch_x, batch_y))
if __name__ == '__main__':
show_batch()输出为:
tensor([ 1., 2., 3., 4., 5., 6., 7., 8., 9., 10., 11.])
tensor([11., 10., 9., 8., 7., 6., 5., 4., 3., 2., 1.])
steop:0, batch_x:tensor([ 3., 2., 8., 11., 1.]), batch_y:tensor([ 9., 10., 4., 1., 11.])
steop:1, batch_x:tensor([ 5., 6., 7., 4., 10.]), batch_y:tensor([7., 6., 5., 8., 2.])
steop:2, batch_x:tensor([9.]), batch_y:tensor([3.])
steop:0, batch_x:tensor([ 9., 7., 10., 2., 4.]), batch_y:tensor([ 3., 5., 2., 10., 8.])
steop:1, batch_x:tensor([ 5., 11., 3., 6., 8.]), batch_y:tensor([7., 1., 9., 6., 4.])
steop:2, batch_x:tensor([1.]), batch_y:tensor([11.])
steop:0, batch_x:tensor([10., 5., 7., 4., 2.]), batch_y:tensor([ 2., 7., 5., 8., 10.])
steop:1, batch_x:tensor([3., 9., 1., 8., 6.]), batch_y:tensor([ 9., 3., 11., 4., 6.])
steop:2, batch_x:tensor([11.]), batch_y:tensor([1.])
Process finished with exit code 0
若drop_last=True
"""
批训练,把数据变成一小批一小批数据进行训练。
DataLoader就是用来包装所使用的数据,每次抛出一批数据
"""
import torch
import torch.utils.data as Data
BATCH_SIZE = 5
x = torch.linspace(1, 11, 11)
y = torch.linspace(11, 1, 11)
print(x)
print(y)
# 把数据放在数据库中
torch_dataset = Data.TensorDataset(x, y)
loader = Data.DataLoader(
# 从数据库中每次抽出batch size个样本
dataset=torch_dataset,
batch_size=BATCH_SIZE,
shuffle=True,
# num_workers=2,
drop_last=True,
)
def show_batch():
for epoch in range(3):
for step, (batch_x, batch_y) in enumerate(loader):
# training
print("steop:{}, batch_x:{}, batch_y:{}".format(step, batch_x, batch_y))
if __name__ == '__main__':
show_batch()对应的输出为:
tensor([ 1., 2., 3., 4., 5., 6., 7., 8., 9., 10., 11.])
tensor([11., 10., 9., 8., 7., 6., 5., 4., 3., 2., 1.])
steop:0, batch_x:tensor([ 9., 2., 7., 4., 11.]), batch_y:tensor([ 3., 10., 5., 8., 1.])
steop:1, batch_x:tensor([ 3., 5., 10., 1., 8.]), batch_y:tensor([ 9., 7., 2., 11., 4.])
steop:0, batch_x:tensor([ 5., 11., 6., 1., 2.]), batch_y:tensor([ 7., 1., 6., 11., 10.])
steop:1, batch_x:tensor([ 3., 4., 10., 8., 9.]), batch_y:tensor([9., 8., 2., 4., 3.])
steop:0, batch_x:tensor([10., 4., 9., 8., 7.]), batch_y:tensor([2., 8., 3., 4., 5.])
steop:1, batch_x:tensor([ 6., 1., 11., 2., 5.]), batch_y:tensor([ 6., 11., 1., 10., 7.])
Process finished with exit code 0
总结
加载全部内容