Python OpenCV Canny边缘检测
乔卿 人气:0Gaussian smoothing
总的来说,Canny边缘检测可以分为四个步骤:
由于边缘检测对噪声敏感,因此对图像应用高斯平滑以帮助减少噪声。
具体做法是,采用一个5*5的高斯平滑滤波器对图像进行滤波处理。
Computing the gradient magnitude and orientation
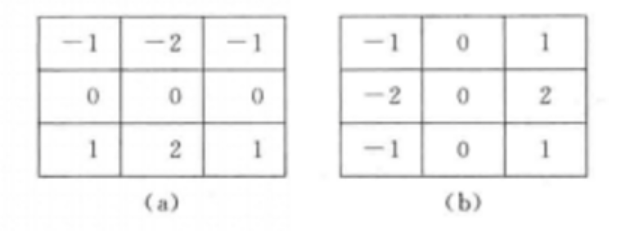
对平滑后的图像,在水平、垂直两个方向上使用Sobel算子(如下图)计算梯度大小,得到两个方向上的一阶导数Gx与Gy。
在得到两个方向上的梯度之后,对这两个向量求和,得到这一点处的梯度大小与方向。
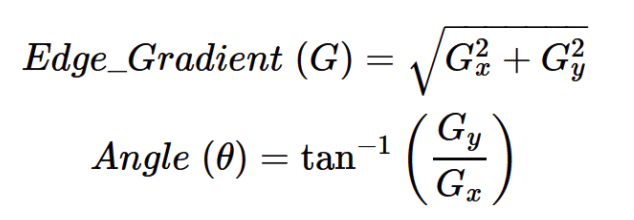
采用四舍五入,将梯度方向确定为上下左右与四个对角线方向之一(45°的倍数)。
Non-maxima suppression
在得到梯度大小与方向之后,对图像进一步扫描,去除不构成边缘的不重要的像素信息,这里采用的方法是非极大值抑制——在每个像素处,检查像素是否在其梯度方向的邻域中是局部最大值,只保留局部最大值的梯度。
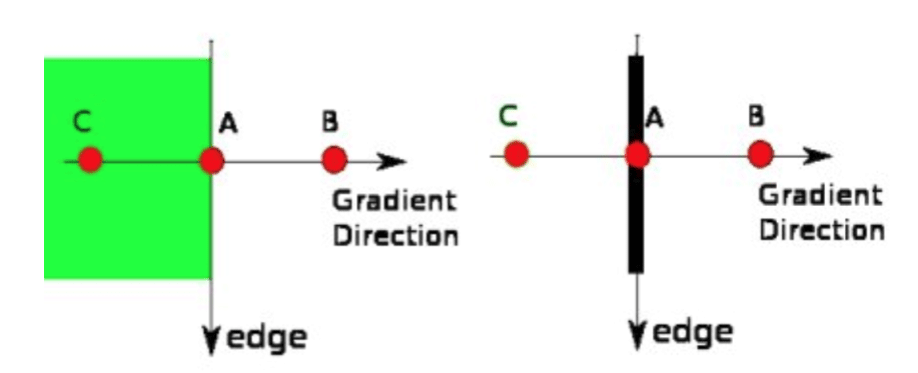
在上图中,点A位于边缘上。梯度方向与边缘方向垂直。为了确定要不要保留A点作为边缘,需要将A点处的梯度大小与B、C两点的梯度大小比较,如果A点的梯度大小不是局部最大,则将该点抑制。
因此,从结果上讲,NMS其实是将B、C两点抑制了,它们不会出现在结果中,因此这一步的效果是“thin edges”。
Hysteresis thresholding
定义上界与下界两个阈值,并规定:
- 任何梯度强度大于上界的像素都是边;
- 任何梯度强度小于下界的像素都不是边;
- 任何梯度介于两个阈值之间的可能是边,此时考察它们的连通性,如果它们和第一种情况(确定是边缘的像素)相连接,就认为它们是边缘,否则认为它们不是边缘。
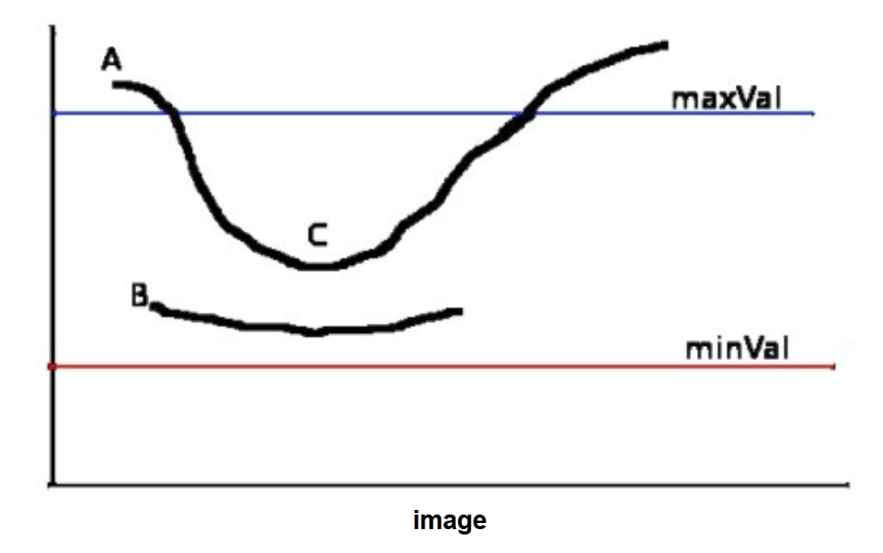
在上图中,A点在maxVal阈值之上,确定是边缘。C介于两个阈值之间,但与A相连,因此它也是边缘。B介于两个阈值之间,它所在的曲线上并没有任何像素点的梯度强度在maxVal之上,因此它不是边缘。
需要指出的是,上面四步操作之后得到的是strong edges。
OpenCV实现
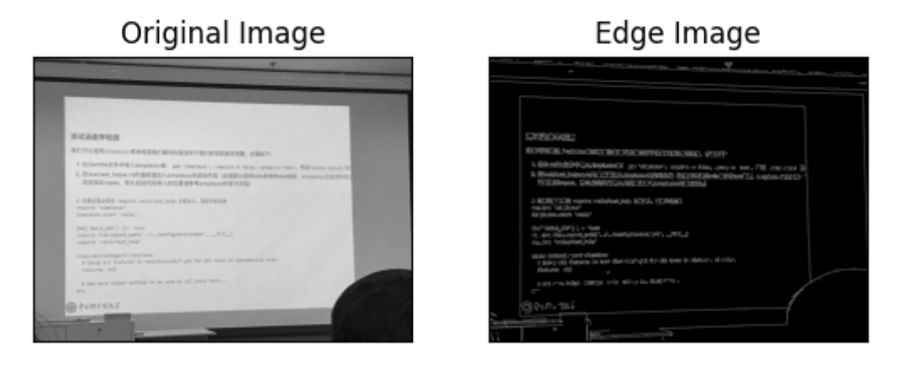
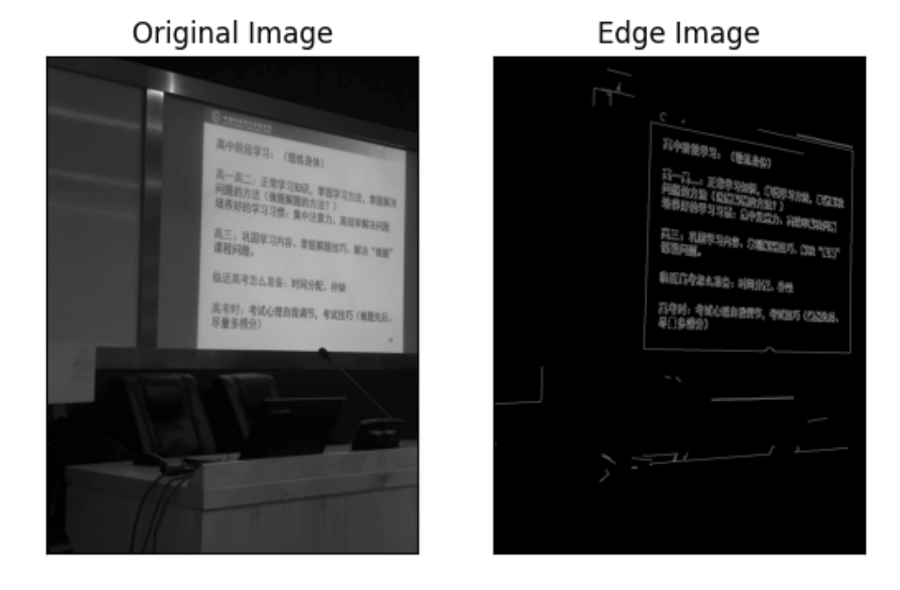
OpenCV提供了cv.Canny()方法,该方法将输入的原始图像转换为边缘图像。
该方法的原型为:
cv.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient]]]) -> edges cv.Canny(dx, dy, threshold1, threshold2[, edges[, L2gradient]]) -> edges
image参数是array格式的输入图像。threshold1与threshold2分别是我们的下界阈值与上界阈值。apertureSize是用于查找图像梯度的Sobel核的大小,默认为3。L2gradient指定了求梯度幅值的公式,是一个布尔型变量,默认为False。当它为True时,使用L2,否则使用L1。
下面是具体代码:
def canny_detect(image_path, show=True):
# 读取图像
image = cv2.imread(image_path, 0)
# 获取结果
edges = cv2.Canny(image, 100, 200)
if show:
# 绘制原图
plt.subplot(121)
plt.imshow(image, cmap='gray')
plt.title('Original Image')
plt.xticks([])
plt.yticks([])
# 绘制边缘图
plt.subplot(122)
plt.imshow(edges, cmap='gray')
plt.title('Edge Image')
plt.xticks([])
plt.yticks([])
plt.show()
return edges
canny_detect('images/2.jpeg')效果:
加载全部内容