C语言数据结构快速排序
_奇奇 人气:0“田家少闲月,五月人倍忙”“夜来南风起,小麦覆陇黄”
C语言朱武大战数据结构专栏
快速排序
快速排序是Hoare于1962年提出的一种二叉树结构的交换排序方法。所以快速排序有种方法是以他的名字命名的。相比70年前的祖师爷级的 大佬 来说,今天我们学习快速排序的成本已经非常低了。今天的我们的是站在巨人的肩膀上学习快速排序。
快速排序有三种方法实现,我们 都 需要掌握。
一、经典1962年Hoare法
让我们来看看1962年祖师爷发明的快排吧。
什么是快速排序?给你以下代码,请你完善快速排序,你将怎么完善?
快速排序:顾名思义,它比较快,整体而言适合各种场景下的排序。缺陷相较于其他排序小。且大部分 程序语言 排序的库函数 的 源代码都是由快速排序实现的
void QuickSort(int* a, int left, int right)
{
//请你完善以下代码
}
int main()
{
int arr[] = {6,1,2,7,9,3,4,5,10,8};
int sz = sizeof(arr) / sizeof(arr[0]);
QuickSort(arr, 0, sz-1);
return 0;
}
具体实现:
Hoare法和二叉树的**前序遍历(根 左子树 右子树)**简直一模一样。
整体思路:
1.先进行一趟排序。
2.进行左半区间(左子树)递归。
3.进行右半区间(右子树)递归。
1.单趟排序
所有的排序的思想:就是先考虑单趟的排序,再合成n躺排序。这是毋庸置疑的,因为这样的思想很自然。
对于单趟排序,也有一个思路。可以说算是规定吧,这是祖师爷Hoare的规定。
为了好理解思路,以下思路是整体上的思路,写出来的程序还是有bug的。具体细节需要后期修改。
一定要按照规定走哦,不要问那么多为什么。按照规定走你就知道为什么要这么做了。总体思路规定:
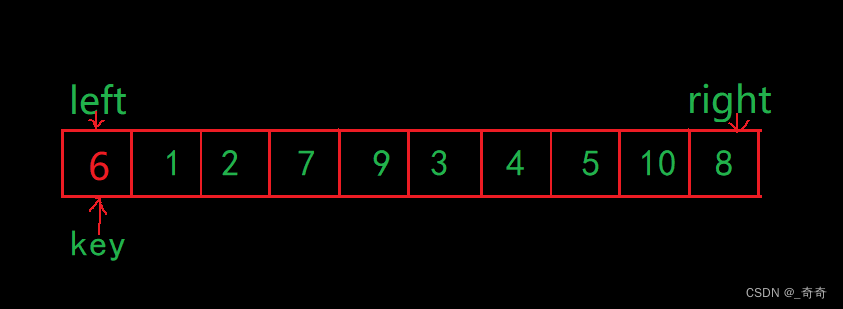
1.设置一个基准值key,key一般为左边第一个数的下标。定义左指针left和有指针right分别指向第一个和最后一个。
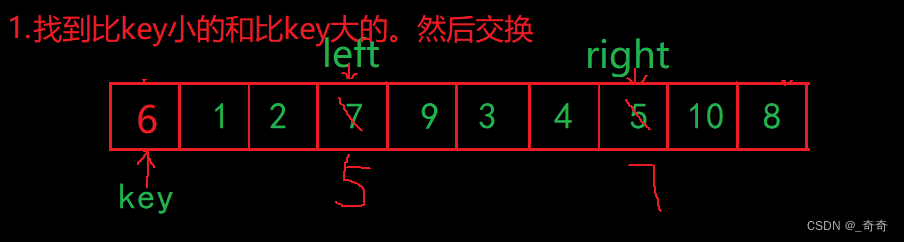
2.先让右边的right指针往左走,一直找比key所指向小的数,找到后就停下。
3.紧接着让left指针往右走,一直找比key所指向大的数,找到后就停下。
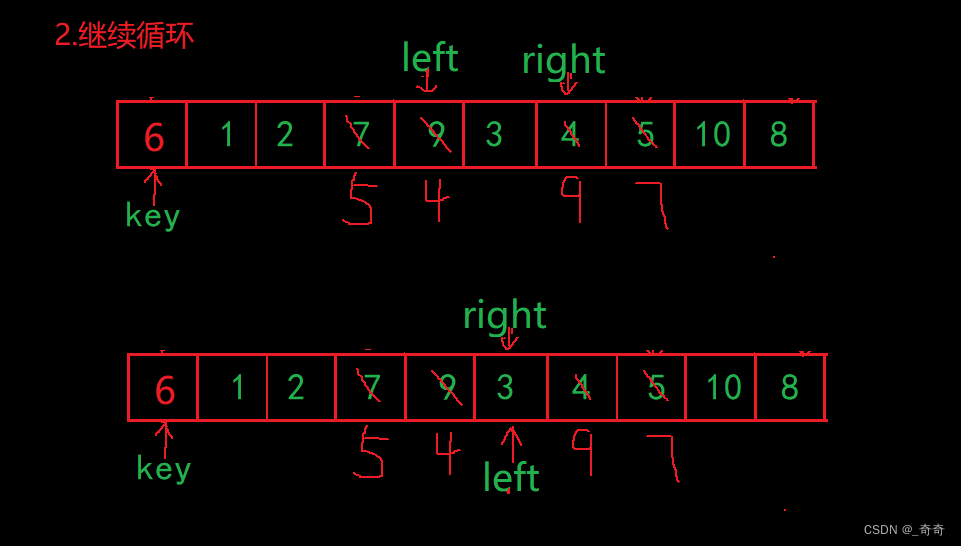
4.如果第2步的right和第3步left都找到了,则交换swap两者的值。然后继续循环2和3步,直到left >= right为止。
5.此时left = right, 交换left和right相遇的位置的值 与 key位置上的值。
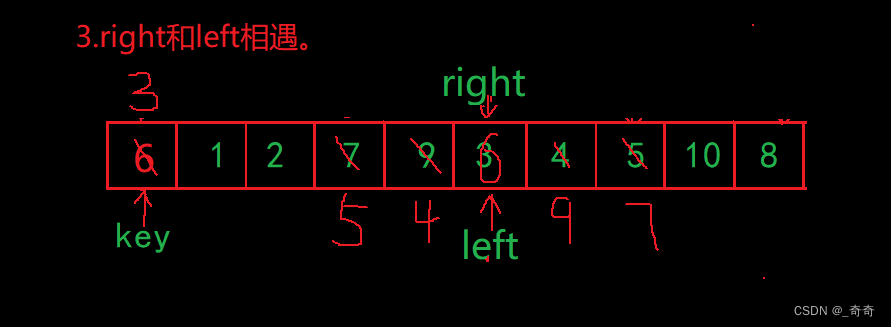
此时,Hoare 的单趟排序完成。产生的效果是key作为分割线,把大小分割开了,比key所指向值小的在key左边,比key所指向值大的在key右边。
2.递归左半区间和右半区间
对于单趟来说。
单趟排完之后,key已经放在正确的位置了。
如果左边有序,右边有序,那么我们整体就有序了。
那左边和右边如何有序呢?
解释:分治解决子问题。相当于二叉树。
一趟排序完成后,再对左半区间进行单趟排序,一直递归到什么时候结束呢?
解释:递归到左半区间只有一个值的时候,或者为空的时候递归结束。
这个过程适合用 画递归图 来查看。
由于数据是10个数,递归图庞大。所以此处省略。下面双指针法有具体递归图。
3.代码实现
具体代码实现和你想的总是那么不同。因为特殊情况确实是存在,且还是那么离谱。
我认为这个题难在了边界问题,边界问题要时刻注意!。
特殊情况1:当排以下数据时,我只是把6改了,这样会导致right和left直接不走了。
{6,1,2,7,9,3,4,5,10,6}
特殊情况2:当排以下数据时,会发生left找不到最大的值导致越界。
{5,4,3,2,1}
改动如下。
//快速排序Hoare
int PartSort(int* a, int left,int right)
{
int key = left;
while (left < right)
{
while (left < right && a[right] >= a[key])
{
--right;
}
while (left < right && a[left] <= a[key])
{
++left;
}
swap(&a[left], &a[right]);
}
swap(&a[left], &a[key]);
return left;
}
void QuickSort(int* a, int left, int right)
{
//当有个区间为空的时候right-left会小于0。
if (right <= left)
return;
int div = PartSort(a, left, right);
QuickSort(a, left, div-1);
QuickSort(a, div+1, right);
}
int main()
{
int arr[] = {6,1,2,7,9,3,4,5,10,8};
int sz = sizeof(arr) / sizeof(arr[0]);
QuickSort(arr, 0, sz-1);
return 0;
}
二、填坑法(了解)
和Hoare法思想类似,大差不差,没什么区别。相比Hoare法较好理解。因为挖坑填坑思想很生动形象,所以较好理解。
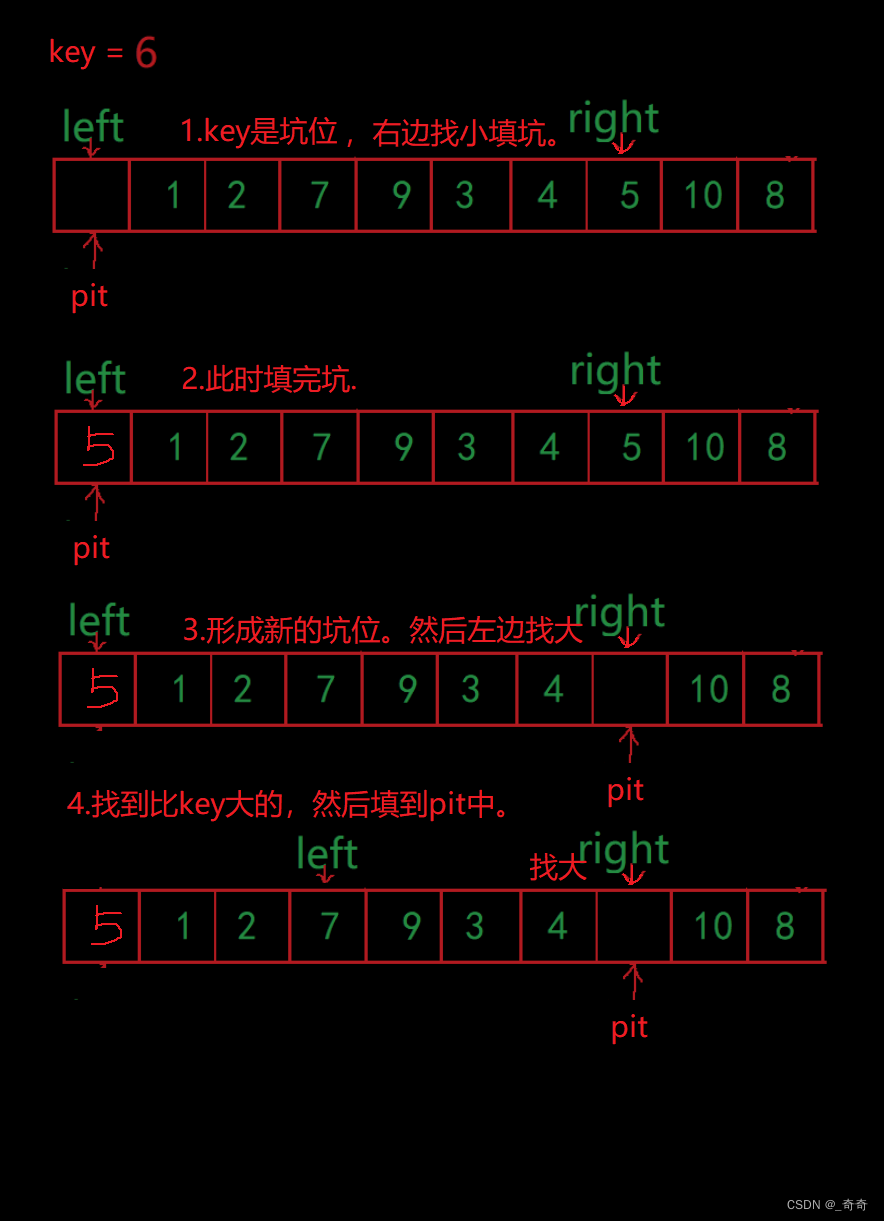
1.单趟思路
单趟思路:
1.先保存key的值。让左边的key做坑(pit),让右边找比key小的,然后填到坑中。
2.然后让那个小的做坑,再让左边找比key大的,找到后填到坑中。依次循环,直到right和left相遇。
3.相遇后,把key的值填到相遇的位置。
这时,单趟循环结束。
2.代码实现
和Hoare法相似,只是少了交换的步骤。注意:要事先把key的值保存下来。
int PartSort(int* a, int left, int right)
{
int keyval = a[left];
int pit = left;
while (left < right)
{
while (left < right && a[right] >= keyval)
{
right--;
}
a[pit] = a[right];
pit = right;
while (left < right && a[left] <= keyval)
{
left++;
}
a[pit] = a[left];
pit = left;
}
a[pit] = keyval;
return left;
}
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
int div = PartSort(a, left, right);
QuickSort(a, left, div - 1);
QuickSort(a, div + 1, right);
}
int main()
{
int arr[] = { 6,1,2,7,9,3,4,5,10,8 };
int sz = sizeof(arr) / sizeof(arr[0]);
QuickSort(arr, 0, sz-1);
return 0;
}
三、双指针法(最佳方法)
1.单趟排序
和以上两种方法的不同之处只有单趟排序,也就是PartSort函数的部分.
优点:有了双指针的优化,不需要考虑 边界问题!写代码不易出错。
代码好写,不好理解。代码极为简单,只需五行。
双指针法也称快慢指针法,两个指针一前一后
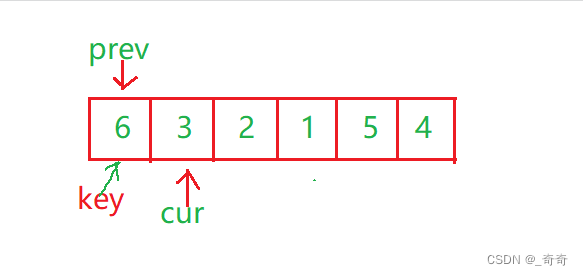
2.具体思路
对于排6,3,2,1,5,4的升序来说。
思路:让cur找比key指向的值小的,找到后,++prev,交换prev和cur位置的值。若cur比key指向的值大,则不交换。
prev和cur的关系:
1.cur还没遇到比key大的值时,prev紧跟着cur,一前一后。
2.cur遇到比key大的,prev和cur之间的一段都是最大的值
第一趟排序后的结果。这时候div为基准值。将左右子树分隔开。

全部排完序后的二叉树图。

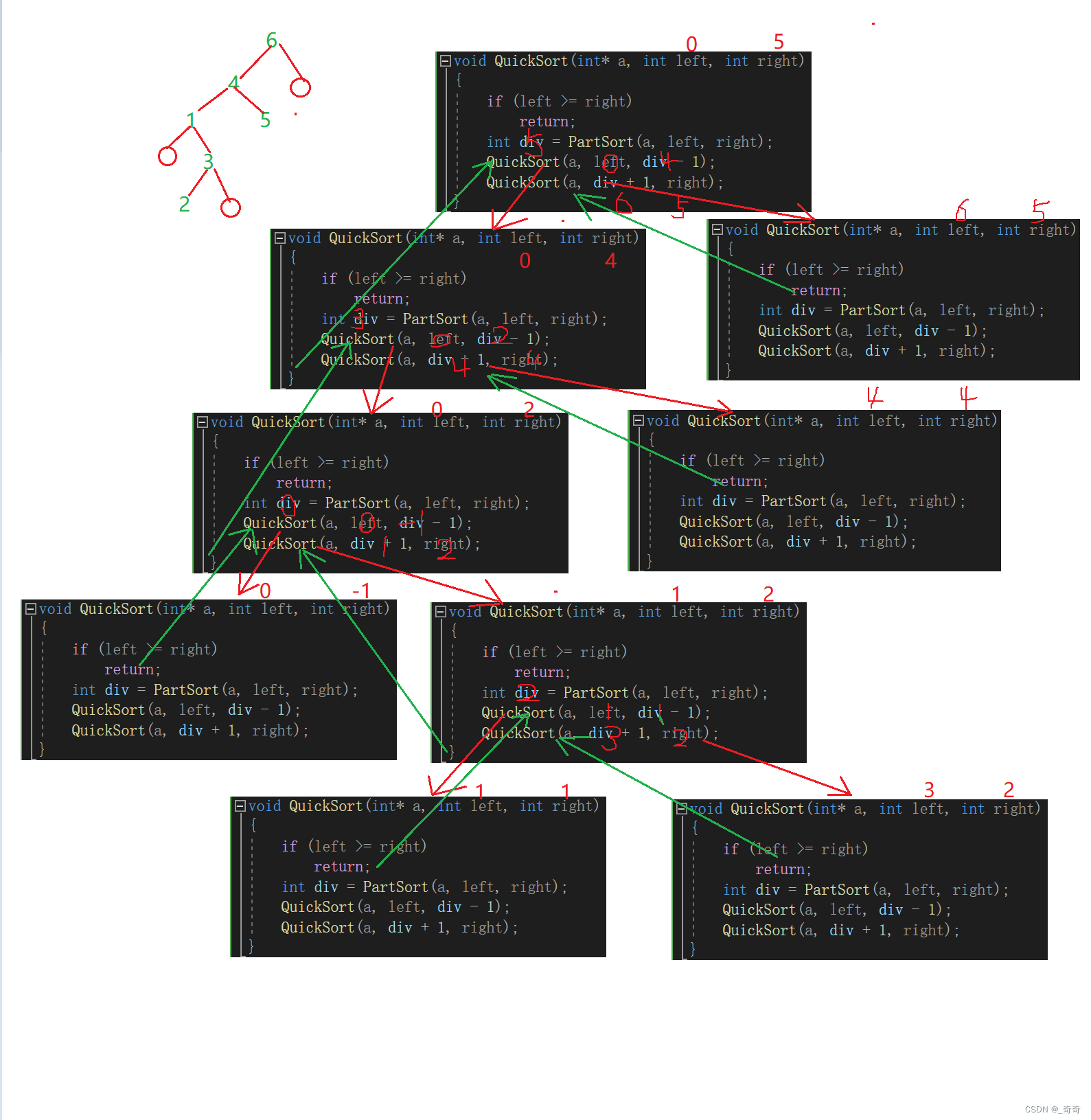
3.代码递归图
红色线代表递归,绿色线代表返回。
4.代码实现
#include <stdio.h>
void Swap(int* x, int* y)
{
int t = 0;
t = *x;
*x = *y;
*y = t;
}
int PartSort(int* a, int left, int right)
{
int key = left;
int prev = left;
int cur = left + 1;
//推荐写法一,较好理解
while (cur <= right)
{
if (a[cur] < a[key])
{
++prev;
Swap(&a[cur], &a[prev]);
}
++cur;
}
//写法二。比较妙,不好理解
//while (cur <= right)
//{
// if (a[cur] < a[key] && a[++prev] != a[cur])
// {
// Swap(&a[cur], &a[prev]);
// }
// ++cur;
//}
Swap(&a[prev], &a[key]);
return prev;
}
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
int div = PartSort(a, left, right);
QuickSort(a, left, div - 1);
QuickSort(a, div + 1, right);
}
int main()
{
int arr[] = {6,3,2,1,5,4};
int sz = sizeof(arr) / sizeof(arr[0]);
QuickSort(arr, 0, sz-1);
return 0;
}
到这里快速排序还没有完,因为它存在缺陷。还需继续优化。请往下看
四、三数取中优化(最终方案)
以上三种方法的时间复杂度
最好情况:是O(N*Log2N)。
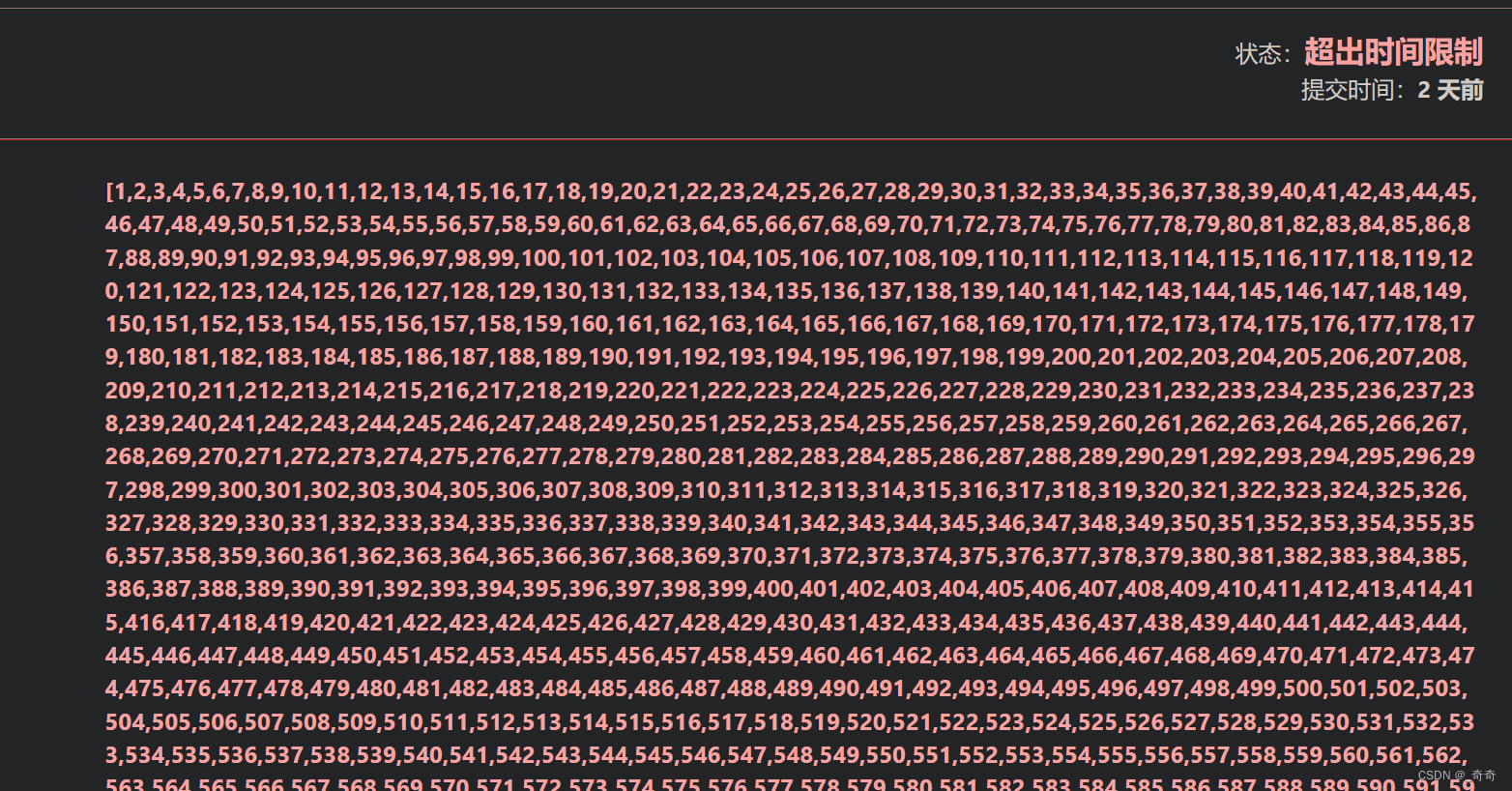
最坏情况:也就是在数据有序的情况下,就退化为了冒泡排序 O(N2)
当给你一组上万个数据测试时,会发生超时现象。
例如LeetCode912. 排序数组
快排竟然超时了,这时候用三数取中来解决此问题。
1.三数取中
三数取中的含义:取三个数中间不是最大也不是最小的那个。哪三个数?第一个,最后一个,和中间那个。例如排以下数据时。
9 8 7 6 5 4 3 2 1 0
思路:
默认key选最左边的数。
1.三个数取第一个 9 和第二个 1 和中间的 5
2.选出不是最大也不是最小的那个,也就是5。
3.将5和key交换位置。也就是和最左边的数交换。
这样做可以打破单边树形状,可以使之变为二分。因为这时候5做了key,key的左边是比5小的,
key的右边是比key大的。
二分后的时间复杂度还是N*LogN
注意:三数取中仍然无法完全解决
在某种特殊情况序列下时间复杂度变为O(n2)的情况
2.代码实现(最终代码)
int GetMidIndex(int* a, int left, int right)
{
//防溢出写法
//int mid = left + (right - left) / 2;
int mid = (left + right) / 2;
if (a[left] < a[mid])
{
if (a[mid] < a[right])
{
return mid;
}
else if (a[left] < a[right])
{
return right;
}
else
{
return left;
}
}
else
{
if (a[mid] > a[right])
{
return mid;
}
else if (a[right] > a[left])
{
return left;
}
else
{
return right;
}
}
}
int PartSort(int* a, int left, int right)
{
int midi = GetMidIndex(a, left, right);
Swap(&a[midi], &a[left]);
int key = left;
int prev = left;
int cur = left + 1;
while (cur <= right)
{
if (a[cur] < a[key])
{
++prev;
Swap(&a[cur], &a[prev]);
}
++cur;
}
Swap(&a[prev], &a[key]);
return prev;
}
void QuickSort(int* a, int left, int right)
{
if (right <= left)
return;
int div = PartSort(a, left, right);
QuickSort(a, left, div - 1);
QuickSort(a, div + 1, right);
}
int main()
{
int arr[] = { 6,1,2,7,9,3,4,5,10,8 };
int sz = sizeof(arr) / sizeof(arr[0]);
QuickSort(arr, 0, sz-1);
return 0;
}
五、时间复杂度(重点)
结论大家都会,是N*LogN。怎么算出来的呢?
1.最好情况下
在最好的情况下:每次选key刚好能平分这组数据,一直都是二分,构成了满二叉树。
1.对于单趟排序的一层递归,不管是哪种方法,left和right每次都遍历了一遍数组,时间复杂度为N。
2.因为满二叉树的高度为Log2N,所以递归深度(深度不等于次数)也为Log2N,所以递归Log2N层就是(N *Log2N).
3.综上所述,快排最好情况下时间复杂度为O(N * LogN).
2.最坏情况下
最坏情况下,每次选key都是最大或者最小的那个元素,这使得每次划分所得的子表中一个为空表,另一个表的长度为原表的长度-1.
这样,长度为n的数据表的快速排序需要经过n趟划分,使得整个排序算法退化为冒泡排序,时间复杂度为N2
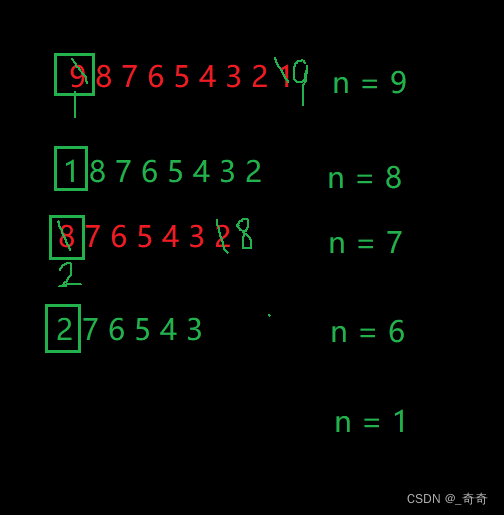
如图是给9 8 7 6 5 4 3 2 1排升序的例子。
每次选最左边的为key。
3.空间复杂度
在空间上来看,尽管快排只需要一个元素的辅助空间。
但是快排需要一个栈空间来实现递归
最好情况下:每一次都被均匀的分割为深度相近的两个子表,所需要栈的最大深度为Log2N。空间复杂度为O(Log2N)
最坏情况下:但最坏的情况下,栈的最大深度为n.这样快速排序的空间复杂度为O(N).这时就会导致栈溢出(Stack Overflow)。因为栈的空间很小。
这时候就需要非递归的算法,来解决栈溢出问题。
六、非递归写法
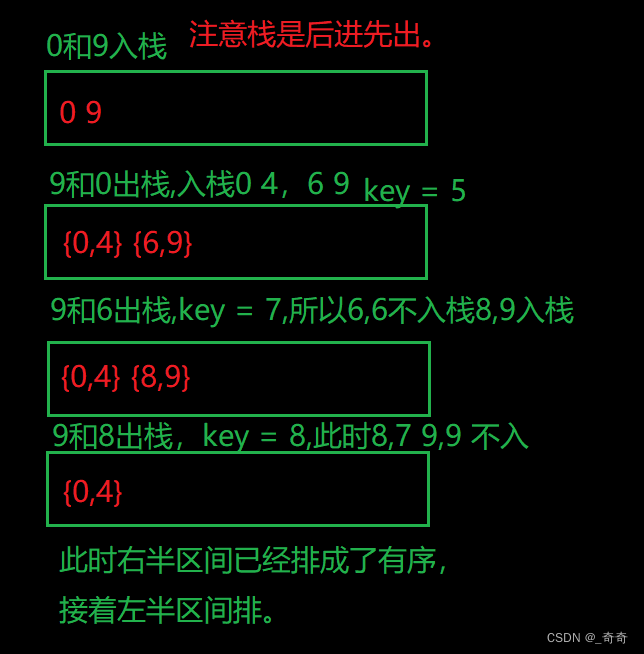
1.栈模拟递归快排
如图对以下数据排序
{ 6,1,2,7,9,3,4,5,10,8 }
void QuickSort(int* a, int begin, int end)
{
ST st;
StackInit(&st);
//先入0和9这段区间
StackPush(&st, begin);
StackPush(&st, end);
while (!StackEmpty(&st))
{
//接着出栈,9和0,注意后进先出
int end = StackTop(&st);
StackPop(&st);
int begin = StackTop(&st);
StackPop(&st);
//然后再进行对0和9这段区间单趟排序。
int keyi = PartSort(a, begin, end);
//[begin , keyi - 1] [keyi+1,end]
//最后判断区间是否为最小规模子问题,来判断是否需要继续入栈。
if (begin < keyi - 1)
{
StackPush(&st, begin);
StackPush(&st, keyi - 1);
}
if (keyi + 1 < end)
{
StackPush(&st, keyi + 1);
StackPush(&st, end);
}
}
//记得销毁栈。
StackDestory(&st);
}
由此可以看出,虽然栈实现快排不是递归,但是和递归的思想一样。简直和递归一模一样。
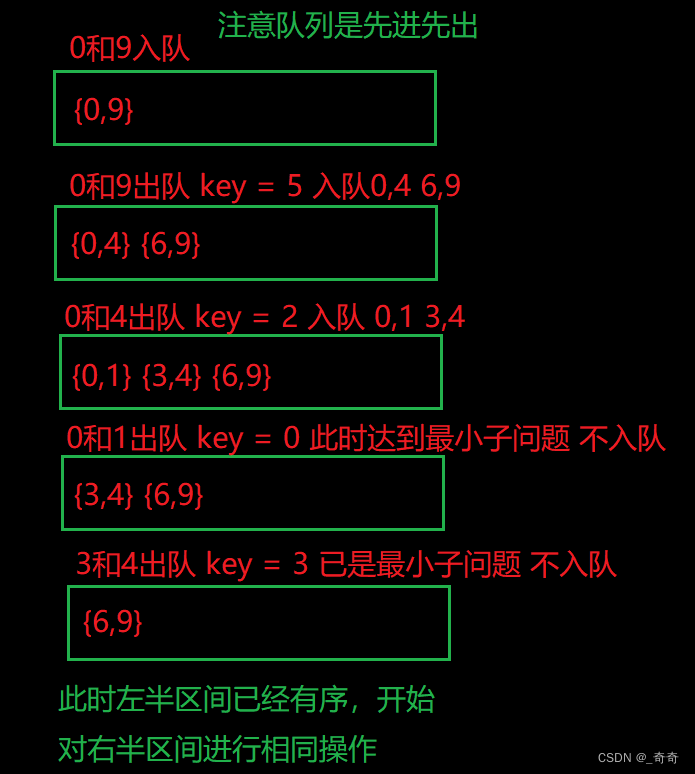
2.队列实现快排
废话不多说。看图
//快速排序的非递归形式1:通过队列来实现
void QuickSort(int* a, int begin, int end)
{
Queue q;
QueueInit(&q);
QueuePush(&q, begin);
QueuePush(&q, end);
while (!QueueEmpty(&q))
{
int left = QueueFront(&q);
QueuePop(&q);
int right = QueueFront(&q);
QueuePop(&q);
int keyi = PartSort(a, left, end);//[left,keyi-1][keyi+1,right]
if (left < keyi - 1)
{
QueuePush(&q, left);
QueuePush(&q, keyi - 1);
}
if (keyi + 1 < right)
{
QueuePush(&q, keyi + 1);
QueuePush(&q, right);
}
}
QueueDestory(&q);
}
浅浅总结下
快排的平均时间复杂度为O(N*LogN)
如果每次划分只有一半区间,另一半区间为空,则时间复杂度为n2
快排对初始顺序影响较大,假如数据有序时,其性能最差。对初始顺序比较敏感
加载全部内容