C++ OpenCV RRT算法
m0_54861649 人气:01.RRT算法简介
代码链接:RRT
动图展示
RRT
2.算法整体框架流程
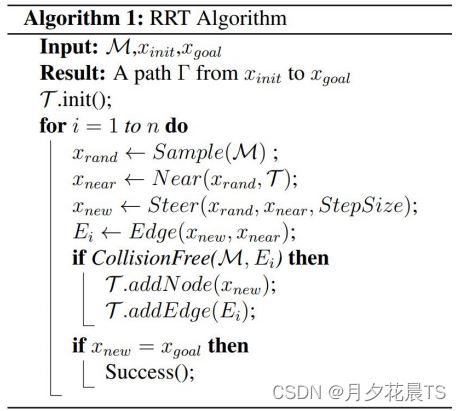
RRT算法整体框架主要分为rand、near、new三点的建立和near与new之间的安全性检查
2.1 rand点的建立
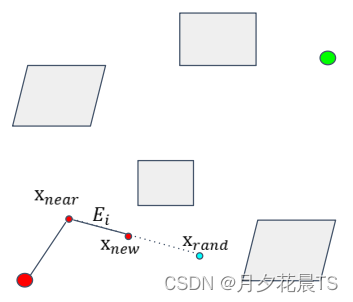
rand点表示在地图 M M M中随机采样获得,记住是随机。我们可以通过设计随机函数,让尽可能的点进入空旷区域,即算法框架中的Sample函数。下图中红色点表示起点,绿色的点表示终点。

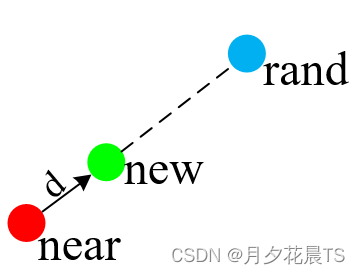
2.2 near和new点的建立
near点表示从RRT树 Γ Gamma Γ中通过距离函数,判断树中哪个点距离当前rand点最近,此时该点即为near点。对应于算法框架中的Near函数。
new点表示以near点到rand为方向,以 E i E_i Ei为步长,生成的一个新点。对应于算法框架的Steer函数。
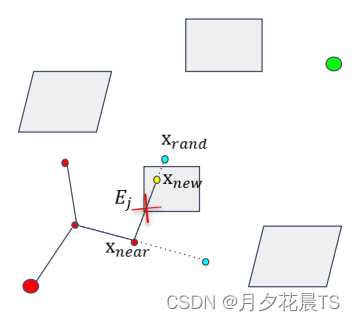
2.3 安全性检查
若上述的new点在安全区域内,且new与near点连线安全,则会在RRT树中进行扩展,否则不会进行扩展。对应于算法框架中的CollisionFree函数。
2.4 算法结束判断
算法框架中的当new点与goal相等,表示算法运行成功,但是实际编程情况中,new点与goal点会存在一定的距离阈值。
3.RRT代码框架
3.1 主函数
main.cpp :首先通过地图文件中读取地图数据(本次代码提供两张地图,供测试使用),然后设置RRT算法的起点和终点,以及相关参数设置,例如距离阈值、步长、迭代次数等。其次通过RRT算法的接口函数RRTCore和CreatePath获得RRT算法的路径,最后通过显示函数Display进行数据可视化。
#include <iostream>
#include <vector>
#include <string>
#include "map.h"
#include "display.h"
#include "RRT.h"
using namespace std;
int main()
{
//读取地图点
//vector<vector<int>>mapData = MapData("map/map.txt");
定义起点和终点,以及阈值
//int xStart = 10;
//int yStart = 10;
//int xGoal = 700;
//int yGoal = 700;
//int thr = 50;
//int delta = 30;
//int numer = 3000;
//读取地图点
vector<vector<int>>mapData = MapData("map/map6.txt");
//定义起点和终点,以及阈值
int xStart = 134; //起点x值
int yStart = 161; //起点y值
int xGoal = 251; //终点x值
int yGoal = 61; //终点y值
int thr = 10; //结束与终点的距离阈值
int delta = 10; //步长
int numer = 3000; //迭代参数
//创建RRT对象
CRRT rrt(xStart, yStart, xGoal, yGoal, thr, delta, mapData);
vector<pair<float, float>>nearList, newList;
vector<pair<int, int>>path;
//RRT核心函数
bool flag = rrt.RRTCore(nearList, newList,numer);
if (flag == true)
{
//通过RRT获得路径
rrt.CreatePath(path);
std::cout << "path size is:" << path.size() << std::endl;
//显示函数
Display(xStart, yStart, xGoal, yGoal, mapData, path, nearList, newList);
}
return 0;
}
3.2 地图数据的获取
本次地图数据通过python程序将地图图片中的障碍物的位置存储起来,然后通过C++流的方式进行读取。
img2txt.py:该程序可以将彩蛇或者黑白地图中的障碍物**(gray_img [ i ] [ j ] [i][j] [i][j]== 0,数据0在图片中为纯黑,表示障碍物;255在图片中为纯白,表示自由可通行区域)**读取,然后以txt的格式进行存储。python程序需要opencv的环境,大家自己百度安装。
# -*- coding: utf-8 -*-
import matplotlib.pyplot as plt # plt 用于显示图片
import numpy as np
import cv2
img = cv2.imread("map/map6.bmp")
print(img.shape)
if len(img.shape)==3:
print("图片为彩色图")
gray_img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
elif len(img.shape)==2:
print("图片为灰度图")
gray_img=img
h=gray_img.shape[0]
w=gray_img.shape[1]
print (gray_img.shape)
f = open("map/map6.txt", "wb")
# 尺寸 h, w
f.write((str(h) + " " + str(w) + "
").encode("utf-8"))
for i in range(h):
for j in range(w):
if gray_img[i][j] == 0:
print("hello world")
f.write((str(i) + " " + str(j) + "
").encode("utf-8"))
f.close()
print ("map.txt save sucessful")
其中保存的地图txt数据分为两部分,第一行表示地图的高和宽;从第二行开始表示障碍物的坐标值,例如234 648表示第648行,第234列那个点的图像像素值为0。图像坐标系中原点坐标在图像的左上角,x轴向右,y轴向下。
800 800
234 648
234 649
234 650
234 651
234 652
234 653
234 654
234 655
234 656
234 657
234 658
234 659
…
map.h
#pragma once #ifndef __MAP__ #define __MAP__ #include <vector> #include<iostream> #include <string> using namespace std; vector<vector<int>> MapData(std::string _MapPath); #endif
map.cpp:通过C++流的方式进行txt数据的读取,按照上述存储方式进行读取。
/*该函数是读取map.txt形成一个二维数组num,其中num里面0表示障碍物,255为可自由区域*/
#include "map.h"
#include<fstream>
#include<sstream>
vector<vector<int>>MapData(std::string _MapPath)
{
ifstream f;
f.open(_MapPath);
string str;
vector<vector<int> > num;
bool FirstLine = true;
while (getline(f, str)) //读取1行并将它赋值给字符串str
{
if (FirstLine)
{
istringstream in(str); // c++风格的串流的输入操作
int a;
in >> a;
int height = a;
in >> a;
int wight = a;
num.resize(height, vector<int>(wight, 255));
FirstLine = false;
}
else
{
istringstream input(str); // c++风格的串流的输入操作
vector<int> tmp;
int a;
while (input >> a) //通过input将第一行的数据一个一个的输入给a
tmp.push_back(a);
num[tmp[0]][tmp[1]] = 0;
}
}
return num;
}
3.3 RRT算法的实现
RRT.h:主要通过RRTCore函数实现RRT算法的本体,通过CreatePath函数获得RRT算法的路径。
#pragma once
#ifndef __RRT__
#define __RRT__
#include <iostream>
#include <string>
#include <vector>
#include <math.h>
#include "ctime"
#define N 999
#define pi 3.1415926
using namespace std;
//定义RRT搜索树结构
struct Tree
{
float Sx; //当前点的x值
float Sy; //当前点的y值 //new点
float SxPrev; //该点先前点的x值
float SyPrev; //该点先前点的x值 //near点
float Sdist; //near点与new点的距离
int SindPrev; //new点的索引
};
class CRRT
{
public:
//RRT构造函数
CRRT(int _xStart, int _yStart, int _xGoal, int _yGoal, int _thr, int _delta, vector<vector<int>>_map);
//距离计算函数
inline float GetDist(int _x1, int _y1, int _x2, int _y2);
//与rand点距离较近的点在RRT树中的索引
int GetMinIndex(int _x1, int _y1, vector<Tree>_T);
//点的安全性判定
inline bool FeasiblePoint(float _x, float _y, vector<vector<int>>_map);
//near点与new点连线之间的碰撞检测
bool CollisionChecking(vector<float> _startPose, vector<float> _goalPose, vector<vector<int>>_map);
//RRT核心函数
bool RRTCore(int _numer,vector<pair<float,float>>& _nearList, vector<pair<float, float>>& _newList);
//RRT生成路径函数
void CreatePath(vector<pair<int, int>>& _path);
private:
vector<Tree> m_TreeList; //RRT搜索树列表
Tree m_tree; //RRT搜索树
vector<vector<int>>m_map; //二维地图
int m_xStart; //起点X值
int m_yStart; //起点Y值
int m_xGoal; //终点X值
int m_yGoal; //终点Y值
int m_thr; //距离阈值
int m_delta; //步长
int m_mapWight; //地图宽度
int m_mapHight; //地图高度
};
#endif
RRT.cpp:主要实现RRT.h头文件中的各成员函数。
#include "RRT.h"
/***********************************************************
*@函数功能: RRT构造函数,对地图宽度和高度进行初始化
-----------------------------------------------------------
*@函数参数: _xStart 起点X值
_yStart 起点Y值
_xGoal 终点X值
_yGoal 终点Y值
_thr 距离阈值
_delta 步长
_map 地图
-----------------------------------------------------------
*@函数返回: 无
***********************************************************/
CRRT::CRRT(int _xStart,
int _yStart,
int _xGoal,
int _yGoal,
int _thr,
int _delta,
vector<vector<int>>_map
):m_xStart(_xStart),m_yStart(_yStart),m_xGoal(_xGoal),m_yGoal(_yGoal),m_thr(_thr),m_delta(_delta),m_map(_map)
{
m_mapWight = _map[0].size();
m_mapHight = _map.size();
}
/***********************************************************
*@函数功能: 两点距离计算函数
-----------------------------------------------------------
*@函数参数: _x1 第一个点X值
_y1 第一个点Y值
_x2 第二个点X值
_y2 第二个点Y值
-----------------------------------------------------------
*@函数返回: 两点之间的距离值
***********************************************************/
inline float CRRT::GetDist(int _x1, int _y1, int _x2, int _y2)
{
return sqrt(pow((_x1 - _x2), 2) + pow((_y1 - _y2), 2));
}
/***********************************************************
*@函数功能: 求rand点距离较近的点在RRT树中的索引
-----------------------------------------------------------
*@函数参数: _x1 rand点X值
_y1 rand点Y值
_T RRT搜索树列表
-----------------------------------------------------------
*@函数返回: 最近索引值
***********************************************************/
int CRRT::GetMinIndex(int _x1, int _y1, vector<Tree>_T)
{
float distance = FLT_MAX; //FLT_MAX表示float最大值
int index = 0;
for (int i = 0; i < _T.size(); i++)
{
if (GetDist(_x1, _y1, _T[i].Sx, _T[i].Sy) < distance)
{
distance = GetDist(_x1, _y1, _T[i].Sx, _T[i].Sy);
index = i;
}
}
return index;
}
/***********************************************************
*@函数功能: 点的安全性判定
-----------------------------------------------------------
*@函数参数: _x1 点X值
_y1 点Y值
_map 地图点
-----------------------------------------------------------
*@函数返回: true表示该点安全,false表示不安全
***********************************************************/
inline bool CRRT::FeasiblePoint(float _x, float _y, vector<vector<int>>_map)
{
//判断该点是否在地图的高度和宽度范围内,且是否在障碍物内
if (!(_x >= 0 && _x < m_mapWight && _y >= 0 && _y < m_mapHight && _map[_y][_x] == 255))
return false;
return true;
}
/***********************************************************
*@函数功能: near点与new点连线之间的碰撞检测
-----------------------------------------------------------
*@函数参数: _startPose near点
_goalPose new点
_map 地图点
-----------------------------------------------------------
*@函数返回: true表示安全,false表示不安全
***********************************************************/
bool CRRT::CollisionChecking(vector<float> _startPose, vector<float> _goalPose, vector<vector<int>>_map)
{
//new点若在障碍物内,直接返回false
if (!(FeasiblePoint(floor(_goalPose[0]), ceil(_goalPose[1]), _map)))
{
return false;
}
float dir = atan2(_goalPose[0] - _startPose[0], _goalPose[1] - _startPose[1]);
float poseCheck[2] = { 0.0,0.0 };
float stop = sqrt(pow(_startPose[0] - _goalPose[0], 2) + pow(_startPose[1] - _goalPose[1], 2));
//r+=2表示在near与new连线的基础上,每次移动2个步长
for (float r = 0; r <= stop; r += 2)
{
poseCheck[0] = _startPose[0] + r*sin(dir);
poseCheck[1] = _startPose[1] + r*cos(dir);
//由于poseCheck点为float类型,为亚像素级,因此判断该点四领域的像素值,ceil向上取整,floor向下取整
if (!(FeasiblePoint(ceil(poseCheck[0]), ceil(poseCheck[1]), _map) &&
FeasiblePoint(floor(poseCheck[0]), floor(poseCheck[1]), _map) &&
FeasiblePoint(ceil(poseCheck[0]), floor(poseCheck[1]), _map) &&
FeasiblePoint(floor(poseCheck[0]), ceil(poseCheck[1]), _map)))
{
return false;
}
}
return true;
}
/***********************************************************
*@函数功能: RRT核心函数
-----------------------------------------------------------
*@函数参数: _nearList near点集合,为引用传参,实际上也为返回值
_newList new点集合,为引用传参,实际上也为返回值
_numer RRT算法迭代次数
-----------------------------------------------------------
*@函数返回: true表示RRT找到路径,false表示没找到
***********************************************************/
bool CRRT::RRTCore(int _numer,vector<pair<float, float>>& _nearList, vector<pair<float, float>>& _newList)
{
//将起点插入树中
m_tree.Sx =m_xStart;
m_tree.Sy = m_yStart;
m_tree.SxPrev = m_xGoal;
m_tree.SyPrev = m_yGoal;
m_tree.Sdist = 0;
m_tree.SindPrev = 0;
m_TreeList.push_back(m_tree);
vector<float>Rand, Near, New;
Rand.resize(2, 0.0);
Near.resize(2, 0.0);
New.resize(2, 0.0);
srand(time(NULL));//设置随机数种子,使每次产生的随机序列不同
int count = 0;
for (int i = 1; i <= _numer; i++)
{
//随机产生地图点Rand
Rand[0] =m_mapWight*(rand() % (N + 1) / (float)(N + 1));
Rand[1] = m_mapHight*(rand() % (N + 1) / (float)(N + 1));
//通过距离判断来计算与Rand最近的Near点
int minDisIndex = GetMinIndex(Rand[0], Rand[1], m_TreeList);
Near[0] = m_TreeList[minDisIndex].Sx;
Near[1] = m_TreeList[minDisIndex].Sy;
//Near与Rand连线,移动delta步长
float theta = atan2(Rand[1] - Near[1], Rand[0] - Near[0]);
New[0] = Near[0] + m_delta*(cos(theta));
New[1] = Near[1] + m_delta*(sin(theta));
//连线碰撞检测
if (!CollisionChecking(Near, New, m_map))
continue;
//扩展RRT搜索树
std::cout << "i:" << i << std::endl;
m_tree.Sx = New[0];
m_tree.Sy = New[1];
m_tree.SxPrev = Near[0];
m_tree.SyPrev = Near[1];
m_tree.Sdist = m_delta;
m_tree.SindPrev = minDisIndex;
m_TreeList.emplace_back(m_tree);
//距离阈值判断,是否搜索结束
if (GetDist(New[0], New[1], m_xGoal, m_yGoal) < m_thr)
{
return true;
}
//保存near点与new点
_nearList.emplace_back(std::make_pair(Near[0], Near[1]));
_newList.emplace_back(std::make_pair(New[0], New[1]));
}
return false;
}
/***********************************************************
*@函数功能: RRT生成路径,逆向搜索
-----------------------------------------------------------
*@函数参数: _path RRT生成路径集合点,为引用传参,实际上也为返回值
-----------------------------------------------------------
*@函数返回: 无
***********************************************************/
void CRRT::CreatePath(vector<pair<int, int>>& _path)
{
pair<int, int>temp;
//将终点加入路径集合点
_path.push_back(std::make_pair(m_xGoal, m_yGoal));
//由于搜索路径结束存在一个阈值,故将搜索树的最后一个点加入路径集合点
_path.push_back(std::make_pair(m_TreeList[m_TreeList.size() - 1].Sx, m_TreeList[m_TreeList.size() - 1].Sy));
int pathIndex = m_TreeList[m_TreeList.size() - 1].SindPrev;
//逆向搜索
while (true)
{
_path.emplace_back(std::make_pair(m_TreeList[pathIndex].Sx, m_TreeList[pathIndex].Sy));
pathIndex = m_TreeList[pathIndex].SindPrev;
if (pathIndex == 0)
break;
}
//将起点加入路径集合点
_path.push_back(std::make_pair(m_TreeList[0].Sx, m_TreeList[0].Sy));
}
接下里主要从RRT中的核心函数RRTCore进行算法介绍。
3.3.1 起点入树
#include "RRT.h"
/***********************************************************
*@函数功能: RRT构造函数,对地图宽度和高度进行初始化
-----------------------------------------------------------
*@函数参数: _xStart 起点X值
_yStart 起点Y值
_xGoal 终点X值
_yGoal 终点Y值
_thr 距离阈值
_delta 步长
_map 地图
-----------------------------------------------------------
*@函数返回: 无
***********************************************************/
CRRT::CRRT(int _xStart,
int _yStart,
int _xGoal,
int _yGoal,
int _thr,
int _delta,
vector<vector<int>>_map
):m_xStart(_xStart),m_yStart(_yStart),m_xGoal(_xGoal),m_yGoal(_yGoal),m_thr(_thr),m_delta(_delta),m_map(_map)
{
m_mapWight = _map[0].size();
m_mapHight = _map.size();
}
/***********************************************************
*@函数功能: 两点距离计算函数
-----------------------------------------------------------
*@函数参数: _x1 第一个点X值
_y1 第一个点Y值
_x2 第二个点X值
_y2 第二个点Y值
-----------------------------------------------------------
*@函数返回: 两点之间的距离值
***********************************************************/
inline float CRRT::GetDist(int _x1, int _y1, int _x2, int _y2)
{
return sqrt(pow((_x1 - _x2), 2) + pow((_y1 - _y2), 2));
}
/***********************************************************
*@函数功能: 求rand点距离较近的点在RRT树中的索引
-----------------------------------------------------------
*@函数参数: _x1 rand点X值
_y1 rand点Y值
_T RRT搜索树列表
-----------------------------------------------------------
*@函数返回: 最近索引值
***********************************************************/
int CRRT::GetMinIndex(int _x1, int _y1, vector<Tree>_T)
{
float distance = FLT_MAX; //FLT_MAX表示float最大值
int index = 0;
for (int i = 0; i < _T.size(); i++)
{
if (GetDist(_x1, _y1, _T[i].Sx, _T[i].Sy) < distance)
{
distance = GetDist(_x1, _y1, _T[i].Sx, _T[i].Sy);
index = i;
}
}
return index;
}
/***********************************************************
*@函数功能: 点的安全性判定
-----------------------------------------------------------
*@函数参数: _x1 点X值
_y1 点Y值
_map 地图点
-----------------------------------------------------------
*@函数返回: true表示该点安全,false表示不安全
***********************************************************/
inline bool CRRT::FeasiblePoint(float _x, float _y, vector<vector<int>>_map)
{
//判断该点是否在地图的高度和宽度范围内,且是否在障碍物内
if (!(_x >= 0 && _x < m_mapWight && _y >= 0 && _y < m_mapHight && _map[_y][_x] == 255))
return false;
return true;
}
/***********************************************************
*@函数功能: near点与new点连线之间的碰撞检测
-----------------------------------------------------------
*@函数参数: _startPose near点
_goalPose new点
_map 地图点
-----------------------------------------------------------
*@函数返回: true表示安全,false表示不安全
***********************************************************/
bool CRRT::CollisionChecking(vector<float> _startPose, vector<float> _goalPose, vector<vector<int>>_map)
{
//new点若在障碍物内,直接返回false
if (!(FeasiblePoint(floor(_goalPose[0]), ceil(_goalPose[1]), _map)))
{
return false;
}
float dir = atan2(_goalPose[0] - _startPose[0], _goalPose[1] - _startPose[1]);
float poseCheck[2] = { 0.0,0.0 };
float stop = sqrt(pow(_startPose[0] - _goalPose[0], 2) + pow(_startPose[1] - _goalPose[1], 2));
//r+=2表示在near与new连线的基础上,每次移动2个步长
for (float r = 0; r <= stop; r += 2)
{
poseCheck[0] = _startPose[0] + r*sin(dir);
poseCheck[1] = _startPose[1] + r*cos(dir);
//由于poseCheck点为float类型,为亚像素级,因此判断该点四领域的像素值,ceil向上取整,floor向下取整
if (!(FeasiblePoint(ceil(poseCheck[0]), ceil(poseCheck[1]), _map) &&
FeasiblePoint(floor(poseCheck[0]), floor(poseCheck[1]), _map) &&
FeasiblePoint(ceil(poseCheck[0]), floor(poseCheck[1]), _map) &&
FeasiblePoint(floor(poseCheck[0]), ceil(poseCheck[1]), _map)))
{
return false;
}
}
return true;
}
/***********************************************************
*@函数功能: RRT核心函数
-----------------------------------------------------------
*@函数参数: _nearList near点集合,为引用传参,实际上也为返回值
_newList new点集合,为引用传参,实际上也为返回值
_numer RRT算法迭代次数
-----------------------------------------------------------
*@函数返回: true表示RRT找到路径,false表示没找到
***********************************************************/
bool CRRT::RRTCore(int _numer,vector<pair<float, float>>& _nearList, vector<pair<float, float>>& _newList)
{
//将起点插入树中
m_tree.Sx =m_xStart;
m_tree.Sy = m_yStart;
m_tree.SxPrev = m_xGoal;
m_tree.SyPrev = m_yGoal;
m_tree.Sdist = 0;
m_tree.SindPrev = 0;
m_TreeList.push_back(m_tree);
vector<float>Rand, Near, New;
Rand.resize(2, 0.0);
Near.resize(2, 0.0);
New.resize(2, 0.0);
srand(time(NULL));//设置随机数种子,使每次产生的随机序列不同
int count = 0;
for (int i = 1; i <= _numer; i++)
{
//随机产生地图点Rand
Rand[0] =m_mapWight*(rand() % (N + 1) / (float)(N + 1));
Rand[1] = m_mapHight*(rand() % (N + 1) / (float)(N + 1));
//通过距离判断来计算与Rand最近的Near点
int minDisIndex = GetMinIndex(Rand[0], Rand[1], m_TreeList);
Near[0] = m_TreeList[minDisIndex].Sx;
Near[1] = m_TreeList[minDisIndex].Sy;
//Near与Rand连线,移动delta步长
float theta = atan2(Rand[1] - Near[1], Rand[0] - Near[0]);
New[0] = Near[0] + m_delta*(cos(theta));
New[1] = Near[1] + m_delta*(sin(theta));
//连线碰撞检测
if (!CollisionChecking(Near, New, m_map))
continue;
//扩展RRT搜索树
std::cout << "i:" << i << std::endl;
m_tree.Sx = New[0];
m_tree.Sy = New[1];
m_tree.SxPrev = Near[0];
m_tree.SyPrev = Near[1];
m_tree.Sdist = m_delta;
m_tree.SindPrev = minDisIndex;
m_TreeList.emplace_back(m_tree);
//距离阈值判断,是否搜索结束
if (GetDist(New[0], New[1], m_xGoal, m_yGoal) < m_thr)
{
return true;
}
//保存near点与new点
_nearList.emplace_back(std::make_pair(Near[0], Near[1]));
_newList.emplace_back(std::make_pair(New[0], New[1]));
}
return false;
}
/***********************************************************
*@函数功能: RRT生成路径,逆向搜索
-----------------------------------------------------------
*@函数参数: _path RRT生成路径集合点,为引用传参,实际上也为返回值
-----------------------------------------------------------
*@函数返回: 无
***********************************************************/
void CRRT::CreatePath(vector<pair<int, int>>& _path)
{
pair<int, int>temp;
//将终点加入路径集合点
_path.push_back(std::make_pair(m_xGoal, m_yGoal));
//由于搜索路径结束存在一个阈值,故将搜索树的最后一个点加入路径集合点
_path.push_back(std::make_pair(m_TreeList[m_TreeList.size() - 1].Sx, m_TreeList[m_TreeList.size() - 1].Sy));
int pathIndex = m_TreeList[m_TreeList.size() - 1].SindPrev;
//逆向搜索
while (true)
{
_path.emplace_back(std::make_pair(m_TreeList[pathIndex].Sx, m_TreeList[pathIndex].Sy));
pathIndex = m_TreeList[pathIndex].SindPrev;
if (pathIndex == 0)
break;
}
//将起点加入路径集合点
_path.push_back(std::make_pair(m_TreeList[0].Sx, m_TreeList[0].Sy));
}
3.3.2 rand点的获取
为了方便起见,并没有设置随机采样函数,通过随机种子进行rand的确定。其中(rand() % (N + 1) / (float)(N + 1))是产生0~1的随机树,小数点与N有关。
m_tree.Sx =m_xStart; m_tree.Sy = m_yStart; m_tree.SxPrev = m_xGoal; m_tree.SyPrev = m_yGoal; m_tree.Sdist = 0; m_tree.SindPrev = 0; m_TreeList.push_back(m_tree); vector<float>Rand, Near, New; Rand.resize(2, 0.0); Near.resize(2, 0.0); New.resize(2, 0.0);
3.3.3 near点的获取
通过简单的距离函数进行near点的判断。其中GetMinIndex就是通过遍历获取与rand点最近的near点,当然可以通过kd-tree对这块进行改进,大家感兴趣可以自行发挥,这里为了方便起见,就采用最原始的方法。
//随机产生地图点Rand Rand[0] =m_mapWight*(rand() % (N + 1) / (float)(N + 1)); Rand[1] = m_mapHight*(rand() % (N + 1) / (float)(N + 1));
3.3.4 new点的获取
//通过距离判断来计算与Rand最近的Near点 int minDisIndex = GetMinIndex(Rand[0], Rand[1], m_TreeList); Near[0] = m_TreeList[minDisIndex].Sx; Near[1] = m_TreeList[minDisIndex].Sy;
注意near点的获取使用C++中的atan2函数,该函数是 atan() 的增强版,能够确定角度所在的象限。
其中**double atan2(double y,double x)**返回 y/x 的反正切值,以弧度表示,取值范围为(-π,π]。如下图所示,红色线为 s i n ( θ ) sin( heta) sin(θ),绿色线为 c o s ( θ ) cos( heta) cos(θ)。
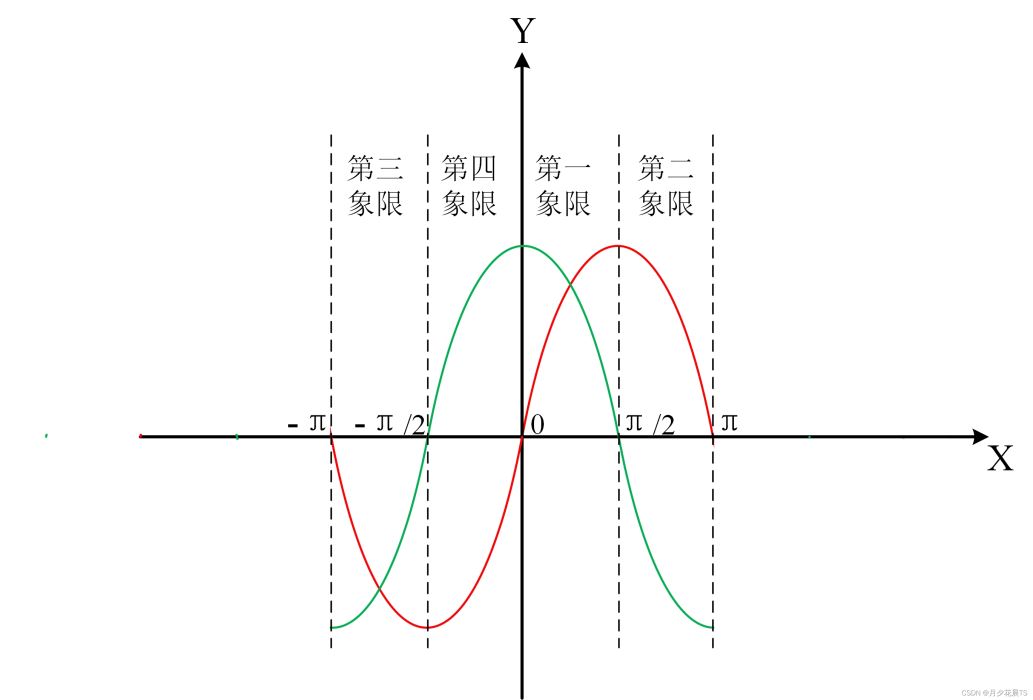
当 (x, y) 在象限中时:
第一象限
第二象限
第三象限
第四象限
0 < θ < π / 2 0< heta<pi/2 0<θ<π/2
π / 2 < θ < π pi/2 < heta <pi π/2<θ<π
π < θ < π / 2 -pi< heta<-pi/2 π<θ<π/2
π / 2 < θ < 0 -pi/2< heta<0 π/2<θ<0
当 (x, y) 在象限的边界(也就是坐标轴)上时:
y = 0 y=0 y=0且 x ≥ 0 x geq 0 x≥0
y = 0 y=0 y=0且 x < 0 x < 0 x<0
y > 0 y>0 y>0且 x = 0 x=0 x=0
y < 0 y<0 y<0且 x = 0 x=0 x=0
θ = 0 heta =0 θ=0
θ = π heta=pi θ=π
θ = π / 2 heta=pi/2 θ=π/2
θ = π / 2 heta=-pi/2 θ=π/2
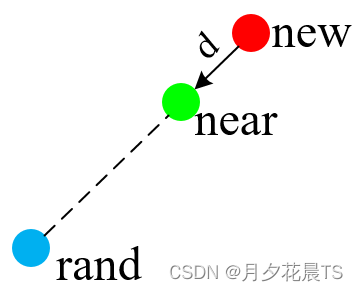
那么
n e w _ x = n e a r _ x + d c o s ( θ ) n e w _ y = n e a e _ y + d s i n ( θ ) new_x=near_x+d*cos( heta) \ new_y=neae_y+d*sin( heta) \ new_x=near_x+dcos(θ)new_y=neae_y+dsin(θ)
表示new点的情况如下,均满足new点在near与rand点之间。这就是atan2带来的好处。
第一象限
第二象限

第三象限
第四象限

3.3.5 安全性检测
near点与new点之间的安全性判断通过CollisionChecking函数所实习,基本思想就是沿着near与new点的方向,每隔一定的微小步长(代码中用 r r r)取一点,判断该点是否在障碍物内。注意微小步长所取的点,它的像素是亚像素级的,可通过双线性插值方法判断该像素的值。本文为了方便起见,判断该点亚像素的周围四点领域,进行安全性判断。
举个例子,例如该点为 p = ( 1.3 , 4.7 ) p=(1.3,4.7) p=(1.3,4.7),通过向下取整floor和向上取整ceil得该亚像素点的四点领域
c e i l ( 1.3 ) = 2 , c e i l ( 4.7 ) = 5 > p 1 = ( 2 , 5 ) ceil(1.3)=2,ceil(4.7) =5 —>p_1=(2,5) ceil(1.3)=2,ceil(4.7)=5>p1=(2,5)
f l o o r ( 1.3 ) = 1 , f l o o r ( 4.7 ) = 4 > p 2 = ( 1 , 4 ) floor(1.3)=1,floor(4.7)=4–>p_2=(1,4) floor(1.3)=1,floor(4.7)=4>p2=(1,4)
c e i l ( 1.3 ) = 2 , f l o o r ( 4.7 ) = 4 > p 3 = ( 2 , 4 ) ceil(1.3)=2,floor(4.7)=4–>p_3=(2,4) ceil(1.3)=2,floor(4.7)=4>p3=(2,4)
f l o o r ( 1.3 ) = 1 , c e i l ( 4.7 ) = 5 > p 4 = ( 1 , 5 ) floor(1.3)=1,ceil(4.7) =5—>p_4=(1,5) floor(1.3)=1,ceil(4.7)=5>p4=(1,5)
bool CRRT::CollisionChecking(vector<float> _startPose, vector<float> _goalPose, vector<vector<int>>_map)
{
//new点若在障碍物内,直接返回false
if (!(FeasiblePoint(floor(_goalPose[0]), ceil(_goalPose[1]), _map)))
{
return false;
}
float dir = atan2(_goalPose[0] - _startPose[0], _goalPose[1] - _startPose[1]);
float poseCheck[2] = { 0.0,0.0 };
float stop = sqrt(pow(_startPose[0] - _goalPose[0], 2) + pow(_startPose[1] - _goalPose[1], 2));
//r+=2表示在near与new连线的基础上,每次移动2个步长
for (float r = 0; r <= stop; r += 2)
{
poseCheck[0] = _startPose[0] + r*sin(dir);
poseCheck[1] = _startPose[1] + r*cos(dir);
//由于poseCheck点为float类型,为亚像素级,因此判断该点四领域的像素值,ceil向上取整,floor向下取整
if (!(FeasiblePoint(ceil(poseCheck[0]), ceil(poseCheck[1]), _map) &&
FeasiblePoint(floor(poseCheck[0]), floor(poseCheck[1]), _map) &&
FeasiblePoint(ceil(poseCheck[0]), floor(poseCheck[1]), _map) &&
FeasiblePoint(floor(poseCheck[0]), ceil(poseCheck[1]), _map)))
{
return false;
}
}
return true;
}
3.4 可视化显示
display.h
#pragma once #ifndef __DISPLAY__ #define __DISPLAY__ #include <opencv2/opencv.hpp> #include <vector> using namespace std; //显示函数 void Display(int _xStart,int _yStart,int _xGoal,int _yGoal, vector<vector<int>>_map, vector<pair<int, int>>_path, vector<pair<float, float>>_nearList, vector<pair<float, float>>_newList); #endif // !__DISPLAY__
display.cpp
注意该代码会在当前项目中的image文件夹(没有该文件夹,手动创建一个即可)中存储rrt显示过程图片(为了后期作gif使用,其他没什么用),若是不想存储,则注释掉。
cv::imwrite(“image/image” + std::to_string(i) + “.jpg”, image);
#include "display.h"
#include <iostream>
#include <string>
#include <Windows.h>
#include <cstdlib>
#include <io.h> // _access
#include <direct.h> //_mkdir
/***********************************************************
*@函数功能: RRT函数显示
-----------------------------------------------------------
*@函数参数: _xStart 起点X值
_yStart 起点Y值
_xGoal 终点X值
_yGoal 终点Y值
_thr 距离阈值
_map 地图
_path 路径点
_nearList near点集合
_newList new点集合
-----------------------------------------------------------
*@函数返回: 无
***********************************************************/
void Display(int _xStart,
int _yStart,
int _xGoal,
int _yGoal,
vector<vector<int>>_map,
vector<pair<int, int>>_path,
vector<pair<float, float>>_nearList,
vector<pair<float, float>>_newList)
{
int mapWight = _map[0].size();
int mapHight = _map.size();
//如没有image文件夹,则新建一个,存放RRT扩展树的中间过程
std::string prefix = "image";
if (_access(prefix.c_str(), 0) == -1) //如果文件夹不存在
{
_mkdir(prefix.c_str()); //则创建
}
//通过地图点绘制图像RGB,白色可通行区域,黑色为障碍物区域
cv::namedWindow("RRT result", CV_WINDOW_AUTOSIZE);
cv::Mat image(mapHight, mapWight, CV_8UC3, cv::Scalar(0, 0, 0));
for (int row = 0; row < mapHight; row++)
{
for (int col = 0; col < mapWight; col++)
{
if (_map[row][col] == 255)
{
image.at<cv::Vec3b>(row, col)[0] = 255;
image.at<cv::Vec3b>(row, col)[1] = 255;
image.at<cv::Vec3b>(row, col)[2] = 255;
}
}
}
//显示起点和终点,红色起点,绿色终点
cv::circle(image, cv::Point(_xStart, _yStart), 4, cv::Scalar(0, 0, 255), -1, 4); //起点
cv::circle(image, cv::Point(_xGoal, _yGoal), 4, cv::Scalar(0, 255, 0), -1, 4); //终点
//显示路径探索过程
for (int i = 0; i < _nearList.size(); i++)
{
cv::line(image, cv::Point(_nearList[i].first, _nearList[i].second), cv::Point(_newList[i].first, _newList[i].second), cv::Scalar(255, 0, 0), 2, 2);
cv::imshow("RRT result", image);
cv::waitKey(100); //100ms刷新一下
cv::imwrite("image/image" + std::to_string(i) + ".jpg", image);
}
//显示最终路径,黄色
for (int i = 0; i < _path.size() - 1; i++)
{
cv::line(image, cv::Point(_path[i].first, _path[i].second), cv::Point(_path[i + 1].first, _path[i + 1].second), cv::Scalar(0, 255, 255), 2, 2);
}
//保存6张最终图片,方便制作gif
for (int i = 0; i <= 5; i++)
{
cv::imwrite("image/image"+std::to_string(_nearList.size()+i)+".jpg", image);
}
cv::imshow("RRT result", image);
cv::waitKey(0);
}
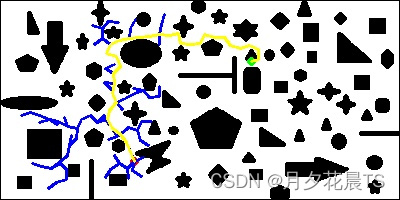
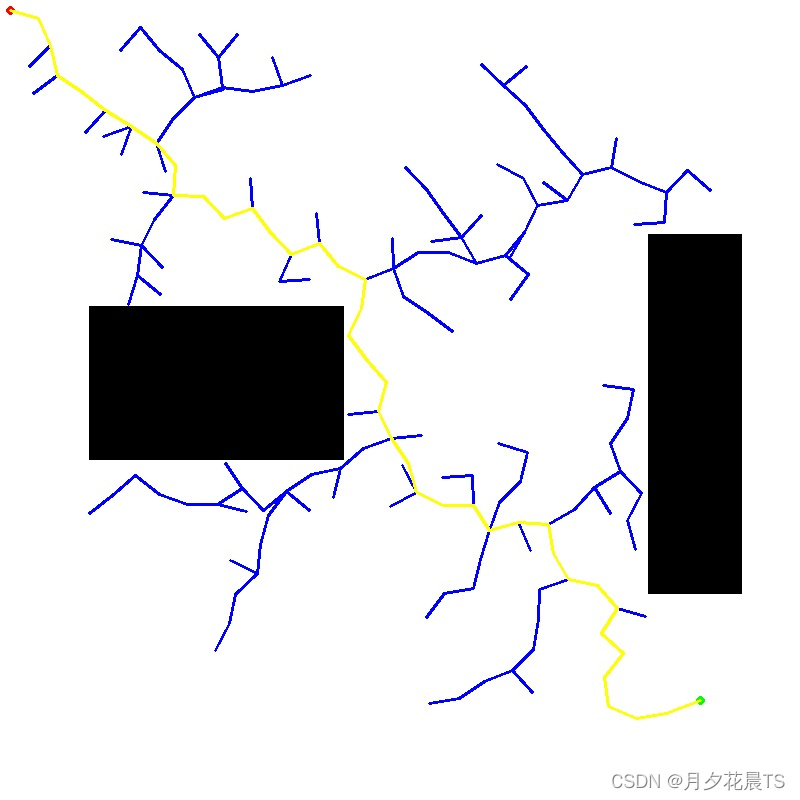
4. 代码运行过程
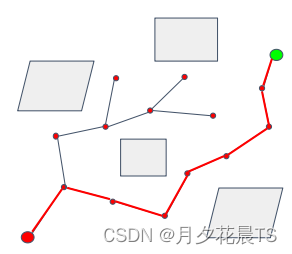
注意显示过程中的“树枝”表示near点与new点的连接。
显示过程
显示结果
map6.bmp

显示过程
显示结果
map.png
<动图太大,CSDN仅支持5M,无法显示>
一个批量将图片转为gif的python脚本,注意python代码中一定要添加dir_list = natsort.natsorted(dir_list),否则会出现图片乱序的问题。
import os
import cv2 as cv
import moviepy.editor as mpy
import numpy as np
import natsort
import imageio
def frame_to_gif(frame_list):
gif = imageio.mimsave('./result.gif', frame_list, 'GIF', duration=0.00085)
dir_list = os.listdir('image')
dir_list = natsort.natsorted(dir_list)
img_list=[]
for i in range(0,len(dir_list)):
print (dir_list[i])
img = cv.imread('image\' + dir_list[i])
#img = cv.cvtcolor(img, cv.color_bgr2rgb)
img_list.append(img)
frame_to_gif(img_list)加载全部内容