C语言 堆排序
李逢溪 人气:0一、本章重点
- 堆的介绍
- 堆的接口实现
- 堆排序
二、堆
2.1堆的介绍
一般来说,堆在物理结构上是连续的数组结构,在逻辑结构上是一颗完全二叉树。
但要满足
- 每个父亲节点的值都得大于孩子节点的值,这样的堆称为大堆。
- 每个父亲节点的值都得小于孩子节点的值,这样的堆称为小堆。
那么以下就是一个小堆。
百度百科:
堆的定义如下:n个元素的序列{k1,k2,ki,…,kn}当且仅当满足下关系时,称之为堆。
若将和此次序列对应的一维数组(即以一维数组作此序列的存储结构)看成是一个完全二叉树,则堆的含义表明,完全二叉树中所有非终端结点的值均不大于(或不小于)其左、右孩子结点的值。由此,若序列{k1,k2,…,kn}是堆,则堆顶元素(或完全二叉树的根)必为序列中n个元素的最小值(或最大值)。

下面序列是堆的是( )。
A.97,56,38,66,23,42,12 //不是大堆也不是小堆,即不是堆。
B.23,86,48,3,35,39,42 //不是大堆也不是小堆,即不是堆。
C.05,56,20,23,40,38,29 //不是大堆也不是小堆,即不是堆。
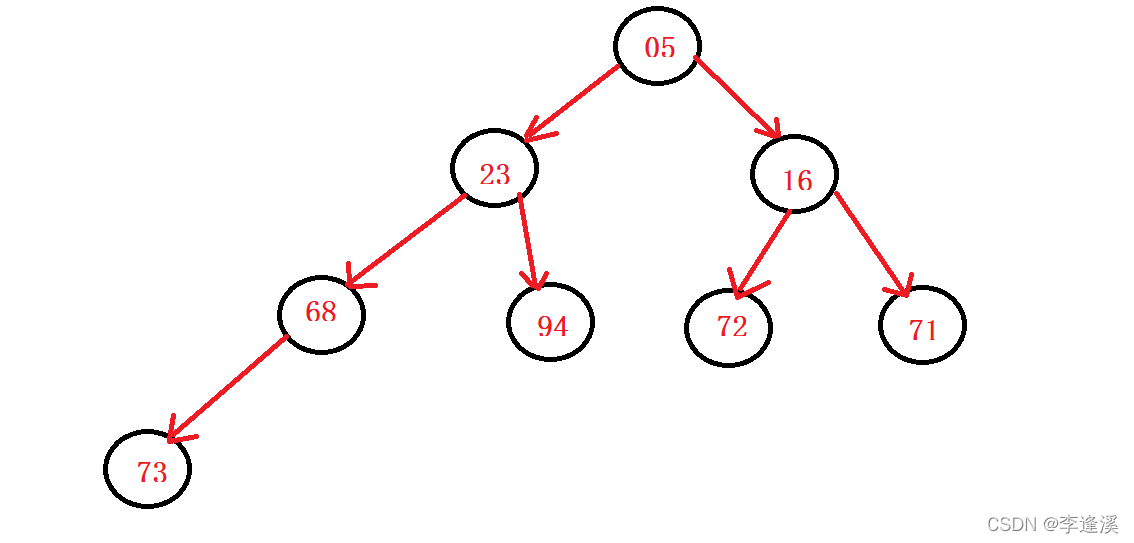
D.05,23,16,68,94,72,71,73 //是小堆
只有D是堆而且是小堆,因此答案选D。
D的逻辑结构:
父亲节点和孩子节点的数组下标有以下关系:
- left_child=(parent+1)*2
- right_child=(parent+2)*2
- parent=(child-1)/2(这里的child左孩子和右孩子都适用)
以上就不做证明了,不过我们可以验证一下,以上图D的逻辑结构为例,16的parent下标是2,72的下标是5,71的下标是6,满足left_child=(parent+1)*2、right_child=(parent+2)*2、parent=(child-1)/2。
有序一定是堆,堆不一定有序。
同时堆顶的数组是整个数组最大的数或者整个数组最小的数。
2.2堆的接口实现
第一件事我们就是要创建堆,实际就是创建一个数组,这里用动态数组。
typedef int HPDataType;
typedef struct Heap
{
HPDataType* a;
size_t size;
size_t capacity;
}HP;堆创建好之后,我们需要对它进行初始化。
第一个接口:
void HeapInit(HP* php);
轻车熟路,将堆中的a置为NULL,size和capacity置为0。
或者这里可以设置capacity不为0的初始值也是可以的。
参考代码:
void HeapInit(HP* php)
{
assert(php);
php->a = NULL;
php->size = php->capacity = 0;
}我们对堆进行初始化之后,也要在最后销毁堆。
第二个接口:
void HeapDestroy(HP* php)
销毁堆,即销毁一个动态数组
参考代码:
void HeapDestroy(HP* php)
{
assert(php);
free(php->a);
php->a = NULL;
php->size = php->capacity = 0;
}现在我们可以考虑往堆中插入数据了,要求插入新元素之后还是堆。
第三个接口:
void HeapPush(HP* php, HPDataType x)
堆没有要求在哪个位置插入新元素,可以在任意的位置插入新元素,但要保证插入新元素之后还是堆。
由于数组在头部还是在中间位置的插入复杂度是O(N),并且插入后不一定是堆了。
因此我们考虑的是直接在数组尾部插入新元素,然后用一个函数去调整数组的顺序使得它还是一个堆。
那么核心代码就是这个调整算法。
先来看这一个堆,插入新元素后该如何进行调整。
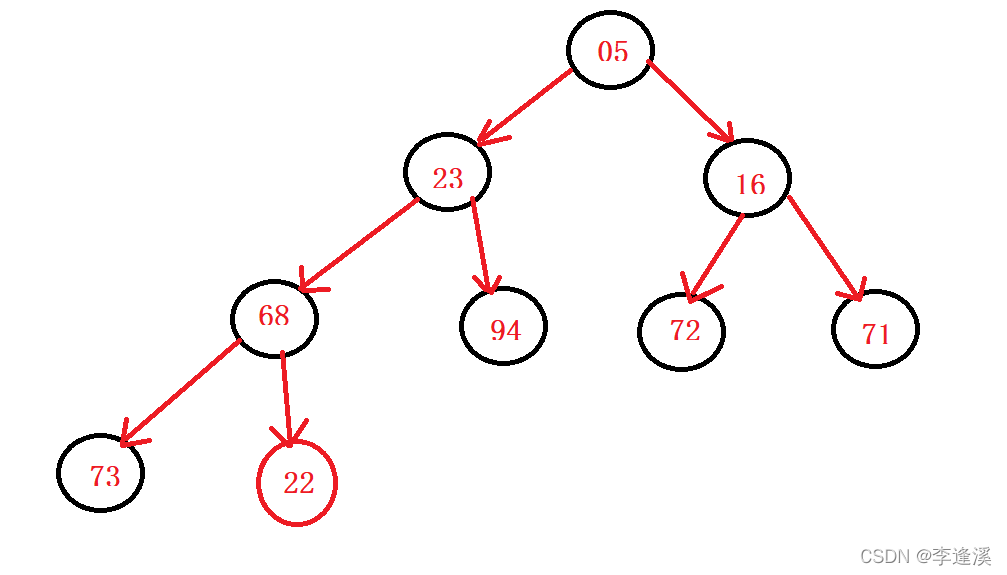
我们在数组的最后插入22,原堆是一个小堆,此时我们需要从下往上去调整各个父亲节点,使得该堆还是一个小堆。
换句话说:我们只需要调整下面有彩色的节点顺序。

交换过程:如果孩子节点小于父亲节点,那么将它们交换,然后迭代。
如果孩子节点大于父亲节点就跳出循环。
迭代过程:将父亲节点的下标赋值给孩子节点的下标,然后重新计算父亲节点的下标,计算方法:parent=(child-1)/2。
参考代码:
void AdjustUp(HPDataType* a, size_t child)
{
size_t parent = (child - 1) / 2;
while (child > 0)
{
//如果孩子小于父亲,则交换
if (a[child] < a[parent])
{
Swap(&a[child], &a[parent]);
child = parent;
parent = (child - 1) / 2;
}
//孩子大于父亲,则结束调整
else
{
break;
}
}
}void HeapPush(HP* php, HPDataType x)
{
assert(php);
//动态数组,空间不够要扩容
if (php->size == php->capacity)
{
size_t newCapacity = php->capacity == 0 ? 4 : php->capacity * 2;
HPDataType* tmp = realloc(php->a, sizeof(HPDataType)* newCapacity);
if (tmp == NULL)
{
printf("realloc failed\n");
exit(-1);
}
php->a = tmp;
php->capacity = newCapacity;
}
//尾插数据
php->a[php->size] = x;
++php->size;
// 向上调整,控制保持是一个小堆
AdjustUp(php->a, php->size - 1);
}上面是多个数据的插入,那么如果插入第一个数据,这个函数还能帮助我们把数据插入堆中吗?
答案是肯定的。
既然有Push数据到堆,自然有从堆中删除元素了。
这里的删除不同于栈和队列的删除,这里指的是将堆顶的数据删除,删除之后堆还是一个堆。为什么只实现删堆顶的数据,因为简单实用,这个接口是为后面的堆排序做准备的。
第四个接口:
void HeapPop(HP* php)
思路比较简单:将数组第一个元素删除,然后保持它还是一个小堆。
怎么删除第一个数据呢?
这里的考虑是将数组第一个元素和数组最后一个交换,交换之后尾删掉最后一个元素,达成删除第一个元素的效果,复杂度是O(N),这里可以提一下,这种头删的方式是改变了数组元素的相对顺序的。
删除之后我们要做调整,使得堆还是小堆。
那么怎么调整呢?
以下是一个小堆
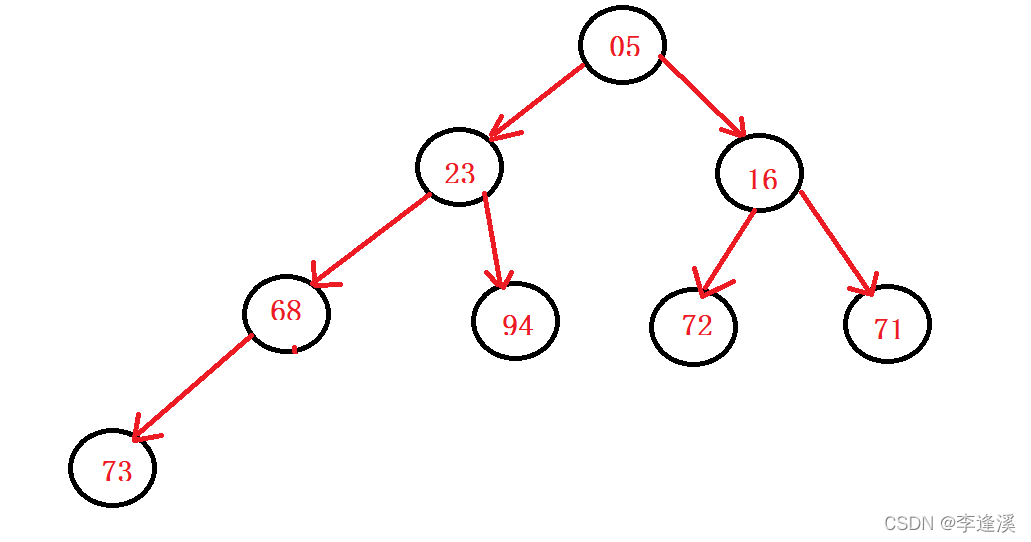
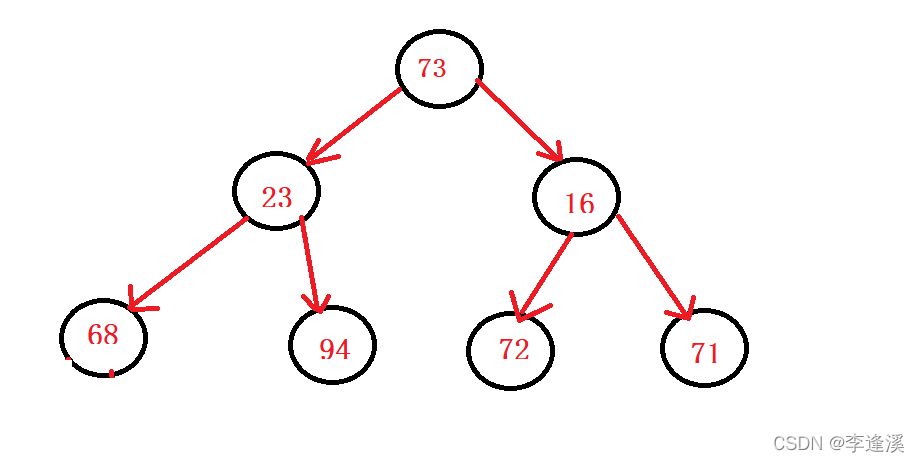
头删之后
如何调整它,使得它还是一个小堆?
这里的思路是:向下调整算法,首先parent=73,然后选出它子节点最小的值,然后它们之间交换,交换之后,将子节点看作新的父亲节点,继续向下调整,直到父亲节点的左孩子不存在。
参考代码:
void AdjustDown(HPDataType* a, size_t size, size_t root)
{
size_t parent = root;
size_t child = parent * 2 + 1;
while (child < size)
{
// 1、选出左右孩子中小的那个
if (child + 1 < size && a[child+1] < a[child])
{
++child;
}
// 2、如果孩子小于父亲,则交换,并继续往下调整
if (a[child] < a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}这里需要注意的是,为什么循环的结束条件不是右孩子不存在呢?
因为右孩子不存在时,也可能要进行交换。
比如:

还需要注意的是左孩子存在右孩子不一定存在
if (a[child+1] > a[child])
{
++child;
}直接这样写a[child+1]可能会越界,因此要加上child + 1 < size,保证child + 1 <= size-1。
参考代码:
void HeapPop(HP* php)
{
assert(php);
assert(php->size > 0);
//将数组第一个元素和最后一个元素交换然后删除最后一个元素,达到头删的目的。
Swap(&php->a[0], &php->a[php->size - 1]);
--php->size;
//向下调整算法
AdjustDown(php->a, php->size, 0);
}其他接口补充:
由于比较简单,理解起来不费劲,因此这里直接给出。
参考代码:
bool HeapEmpty(HP* php)//判断堆是否为空
{
assert(php);
return php->size == 0;
}
size_t HeapSize(HP* php)//堆的元素个数
{
assert(php);
return php->size;
}
HPDataType HeapTop(HP* php)//取堆顶数据
{
assert(php);
assert(php->size > 0);
return php->a[0];
}三、堆排序
堆排序:利用堆顶节点是整个数组的最大值或者最小值的特点,可以达到排序的目的。
比如我们要将1、5、2、4、8、6、10排成升序
可以将这几个元素依次入堆,使得这些数据变成小堆。
然后我们可以取堆的第一个元素,它是整个数组最小的元素,要排升序,那么我们就需要将它排在第一个位置,然后删除堆顶元素,由于我们的删除接口的作用是:删除堆顶元素,并保持堆还是小堆,那么我们调用删除接口之后,再取堆顶元素,将它排在第二个位置,依次继续下去,我们就能将这些数据排成升序了。

参考代码:
void HeapSort(int* a, int size)
{
HP hp;
HeapInit(&hp);
//建小堆
for (int i = 0; i < size; ++i)
{
HeapPush(&hp, a[i]);
}
//不断取堆顶元素进行排序
size_t j = 0;
while (!HeapEmpty(&hp))
{
a[j] = HeapTop(&hp);
j++;
HeapPop(&hp);
}
//销毁堆,防止内存泄露
HeapDestroy(&hp);
}这里的堆排序的空间复杂度是O(N),因为在堆区开辟了一个N个元素大小的堆空间。
堆排序看起来挺复杂的,那么它的时间复杂度是什么呢?
建小堆:0(N)
HeapPop()一次执行的是:头删堆顶元素(O(1)),然后依次向下比较,比较的次数是高度次,因为是完全二叉树,比较的时间复杂度是O(logN)。
因此执行一次HeapPop的时间复杂度是O(logN)。
那么不断取堆顶元素进行排序,取了N个元素,调用了N次HeapPop(),时间复杂度是O(N*logN)。
总的时间复杂度是O(N)+O(N*logN),当N很大时,加的O(N)可以忽略。
实际时间复杂就是:O(N*logN)
空间复杂度:O(N)
那么堆排序的时间复杂度是O(N*logN)。
相比于冒泡排序的O(N*N)。
堆排序显然效率更高。
如果N等于100万,冒泡要执行1万亿次,而堆排序执行2千万次,效率可想而知!
加载全部内容