如何避免go的map竞态问题的方法
有想法的工程师 人气:0背景
在使用go语言开发的过程中,我碰到过这样一种情况,就是代码自测没问题,代码检查没问题,上线跑了一段时间时间了也没问题,就是突然偶尔会抽风panic,导致程序所在的pod(k8s的运行docker镜像的最小单位)重启了,而程序里抛出来的异常如下

,意思是多个协程正在同时对同一个map变量进行读写,这个就涉及到go程序的竞态问题,而竞态问题也是我们日常开发中遇到比较多的情况
为什么会出现竞态问题
出现这个问题的主要原因是有多个协程在对同一个map变量进行修改,这样就可能会出现map被一个协程修改到一半的时候,然后另外一个协程就来读取了,导致读到一个“半成品”的map变量。而这个就说明一个问题,就是map类型并不是并发安全的
而并发安全的定义就是:在高并发下,进程、线程(协程)出现资源竞争,导致出现脏读,脏写,死锁等情况。
那么go语言有如下几种类型不具备并发安全:map,slice,struct,channel,string
不过奇怪的是,只有map类型发生并发竞争的时候,才会抛出fatal error,这个是无法被recover的,一定会中断程序,而这也导致程序运行的pod会被检测出异常从而重启
查了资料,有一种说法是,map大部分会被用来存配置文件,而配置文件出错可能会导致一些严重的业务问题,所以宁愿程序崩溃也要保全业务数据不会出现脏数据(只是一种说法,不用太过在意)
如何解决竞态问题
1、使用go的一些并发原语
如果需要修改的变量是程序启动之后就不需要修改的配置,那么可以使用sync.Once包来处理,这个包的作用就是限制一件事情只做一次,示例代码如下
type User struct {
Name string
Other map[string]interface{}
ConfigOnce sync.Once
}
// InitConfigOnce
// @description "初始化配置信息,只执行一次"
// @auth yezibin 2023-01-21 15:38:09
// @param name string "description"
// @param other map[string]interface{} "description"
// @return *User "description"
func (u *User)InitConfigOnce(name string, other map[string]interface{}) *User {
//Do包起来的方法,只会执行一次,但是必须是同一个sync.Once变量
u.ConfigOnce.Do(func() {
fmt.Println("ok")
u.Name = name
u.Other = other
})
return u
}
// GetUserConfig
// @description "打印配置文件"
// @auth yezibin 2023-01-21 15:38:36
func (u *User) GetUserConfig() {
fmt.Println(u)
}2、加读写锁(RWMutex map)
出现竞态的本质是因为多个协程对同一个变量同时进行读与写,通过用锁来防止这个情况,因为我举得案例是读多写少的情况,用上读写锁性能会更好,示例代码如下
type Mmap struct {
Data map[string]interface{}
Mu sync.RWMutex //因为主要是配置,属于读多写少情况,所以使用读写锁提高锁的性能
}
// InitMmap
// @description "初始化读写锁的map结构体"
// @auth yezibin 2023-01-21 00:09:30
// @return *Config "description"
func InitMmap() *Mmap {
return &Mmap{
Data: make(map[string]interface{}),
}
}
// Get
// @description "获取配置map数据"
// @auth yezibin 2023-01-21 00:10:09
// @param name string "description"
// @return interface{} "description"
func (m *Mmap) Get(name string) interface{} {
m.Mu.RLock()
defer m.Mu.RUnlock()
return m.Data[name]
}
// Set
// @description "批量设置map的值"
// @auth yezibin 2023-02-05 13:08:17
// @param data map[string]interface{} "description"
func (m *Mmap) Set(data map[string]interface{}) {
m.Mu.Lock()
defer m.Mu.Unlock()
for k, v := range data {
m.Data[k] = v
}
}
// SetOne
// @description "设置配置map数据"
// @auth yezibin 2023-01-21 00:10:23
// @param key string "description"
// @param val string "description"
func (m *Mmap) SetOne(key, val string) {
m.Mu.Lock()
defer m.Mu.Unlock()
m.Data[key] = val
}建议
1、如果属于读多写少的情况,尽量选择读写锁来减少锁住的范围,从而提高读写性能
2、这里推荐将需要用来读写的map变量和锁共同组建一个struct,这样能保证读和写上的是同一把读写锁,同时也方便整合对map变量的操作
3、分片加锁
方案2中虽然加了读写锁,比加一把普通的锁要性能高些,不过锁的粒度还是大了些,当高并发来袭时,写的操作必然会阻塞读的动作,那么有没有办法将锁住的范围缩小一些呢
思路:如果给map里的每个元素加锁,每次修改只是单个元素的锁生效,其他没改到的元素就正常读,这样锁的粒度会更细,这就是分片加锁的原理
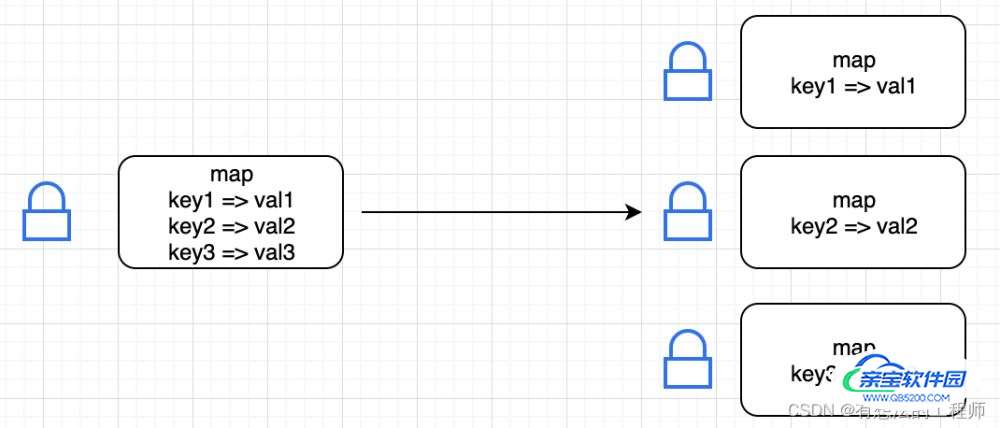
这种就是将一把“大”锁拆成一把把小锁,是一种空间换时间的方法
实现上,已经有人实现了好用的具有分片锁的map,库地址:https://github.com/orcaman/concurrent-map
import (
cmap "github.com/orcaman/concurrent-map"
"sync"
)
// InitCmap
// @description "初始化分片锁的map"
// @auth yezibin 2023-02-05 14:08:17
// @return *cmapConfig "description"
func InitCmap() *cmapConfig {
return &cmapConfig{
cmap.New(),
}
}
// Set
// @description "批量往map写入元素"
// @auth yezibin 2023-02-05 14:10:02
// @param config map[string]interface{} "description"
func (c *cmapConfig) Set(config map[string]interface{}) {
for k, v := range config{
c.Cmap.Set(k, v)
}
}
// Get
// @description "从map获取元素"
// @auth yezibin 2023-02-05 14:10:22
// @param k string "description"
// @return interface{} "description"
func (c *cmapConfig) Get(k string) interface{} {
v, ok := c.Cmap.Get(k)
if ok {
return v
} else {
return nil
}
}4、go的原生可并发map
最后还会跟大家介绍一个go原生库里就有一个可并发读写的map,这个放在sync库
官方的文档中指出,在以下两个场景中使用 sync.Map,会比使用 map+RWMutex 的方式,性能要好得多:
1、只会增长的缓存系统中,一个 key 只写入一次而被读很多次;
2、多个 goroutine 为不相交的键集读、写和重写键值对。
原理:sync.Map结构里有两个字段,一个read,一个dirty。dirty包含read的所有字段,新增字段是写在dirty上,有个miss变量用户访问到read没有,但是dirty有的数据次数

- 空间换时间。通过冗余的两个数据结构(只读的 read 字段、可写的 dirty),来减少加锁对性能的影响。对只读字段(read)的操作不需要加锁。优先从 read 字段读取、更新、删除,因为对 read 字段的读取不需要锁。
- 动态调整。miss 次数多了之后,将 dirty 数据提升为 read,避免总是从 dirty 中加锁读取。double-checking。加锁之后先还要再检查 read 字段,确定真的不存在才操作 dirty 字段。
- 延迟删除。删除一个键值只是打标记,只有在提升 dirty 字段为 read 字段的时候才清理删除的数据。
示例代码
type syncMapConfig struct {
Smap sync.Map
}
// InitSmap
// @description "初始化sync.map"
// @auth yezibin 2023-02-05 15:43:08
// @return *syncMapConfig "description"
func InitSmap() *syncMapConfig {
return &syncMapConfig{
sync.Map{},
}
}
// Set
// @description "批量写入map"
// @auth yezibin 2023-02-05 15:43:57
// @param config map[string]interface{} "description"
func (s *syncMapConfig) Set(config map[string]interface{}) {
for k, v := range config {
s.Smap.Store(k, v)
}
}
// Get
// @description "从map里获取数据"
// @auth yezibin 2023-02-05 15:44:09
// @param k string "description"
// @return interface{} "description"
func (s *syncMapConfig) Get(k string) interface{} {
c, ok := s.Smap.Load(k)
if ok {
return c
} else {
return nil
}
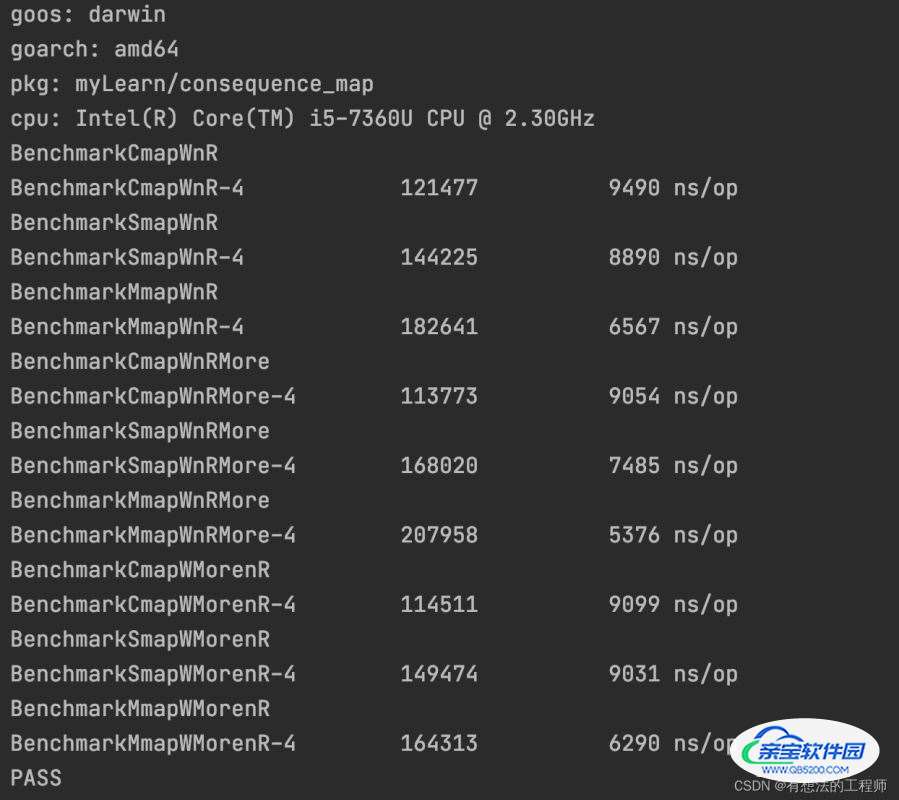
}性能对比
上面说了4种方法,处理用once这个包比较特殊(map只写一次,以后只读),其他都是可读写多次的,有可比性,那么2,3,4这三种方案的性能对比如何呢,哪种情况下该用哪种呢
标注:下面数据对比,带有相关字符的有如下含义
| 字符 | 含义 | 字符 | 含义 |
|---|---|---|---|
| Cmap | 使用了concurrent-map包 | WnR | 写和读一样多次 |
| Smap | 使用了sync.Map包 | WnRMore | 读多写少 |
| Mmap | 使用RWMutex | WMorenR | 写多读少 |
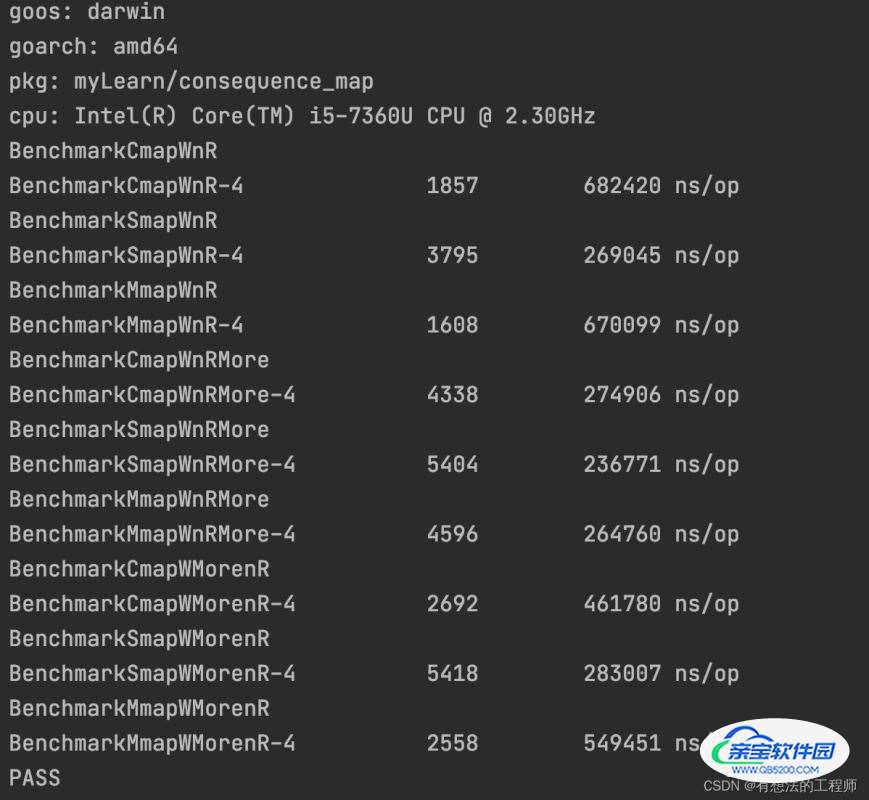
当并发=1000,对map是部分更新,且不是更新读取的字段
当读写一样多的时候性能: sync.Map > concurrent-map > RWMutex map
当读多写少的时候性能:concurrent-map > sync.Map > RWMutex map
当写多读少的时候性能:sync.Map > concurrent-map > RWMutex map
结论:当高并发对map进行读写时,如果写的字段和读的字段错开的时候
concurrent-map 在读多写少的情况下有优势,因为锁的粒度小
sync.Map 在写多读少的情况下有优势,因为有结构设计有优势
而读写锁因为加锁粒度大,导致高并发下性能都不是很好
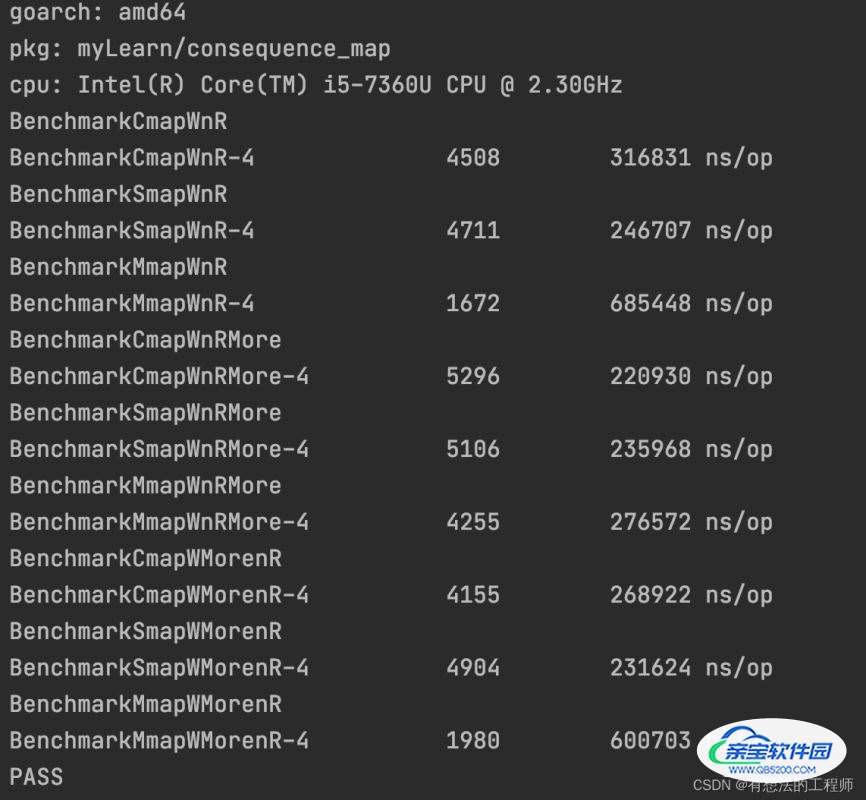
当并发=1000,对map是更新和读取都是同一个字段
当读写一样多的时候性能: sync.Map > RWMutex map > concurrent-map
当读多写少的时候性能:sync.Map > RWMutex map > concurrent-map
当写多读少的时候性能:sync.Map > concurrent-map > RWMutex map
在读写都是同一个map字段的时候,sync.Map的结构优势就凸显了,因为对读和写是针对sync.Map 结构里的read字段,且不加锁;而其他两个包都是会上锁的
当并发=10,对map是部分更新,且不是更新读取的字段
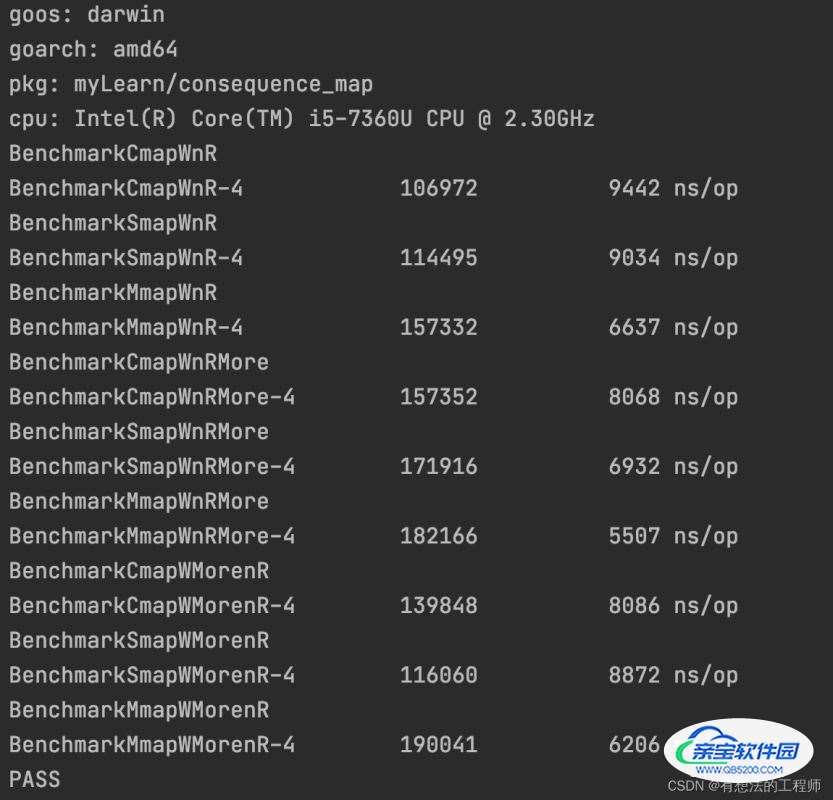
当读写一样多的时候性能: RWMutex map > sync.Map > concurrent-map
当读多写少的时候性能:RWMutex map > sync.Map > concurrent-map
当写多读少的时候性能:RWMutex map > concurrent-map > sync.Map
当并发变低的情况下,RWMutex map的性能就好于其他两种,主要原因是并发低,锁的竞争和阻塞情况变少,反而是结构简单不需要占用大空间的RWMutex map形式要更好
当并发=10,对map是更新和读取都是同一个字段
当读写一样多的时候性能: RWMutex map > sync.Map > concurrent-map
当读多写少的时候性能:RWMutex map > sync.Map > concurrent-map
当写多读少的时候性能:RWMutex map > sync.Map > concurrent-map
当并发变低的情况下,RWMutex map的性能就好于其他两种,主要原因是并发低,锁的竞争和阻塞情况变少,反而是结构简单不需要占用大空间的RWMutex map形式要更好
最终结论
选用哪个方式,其实主要先看并发数,其次看读写模式,再来选择使用哪种模式,以下表格是选用最优解
| 读多写少 | 写多读少 | |
|---|---|---|
| 并发高 | concurrent-map | sync.Map |
| 并发低 | RWMutex map | RWMutex map |
加载全部内容