Python动态演示旋转矩阵的作用详解
微小冷 人气:0先新建一组散点充当坐标轴
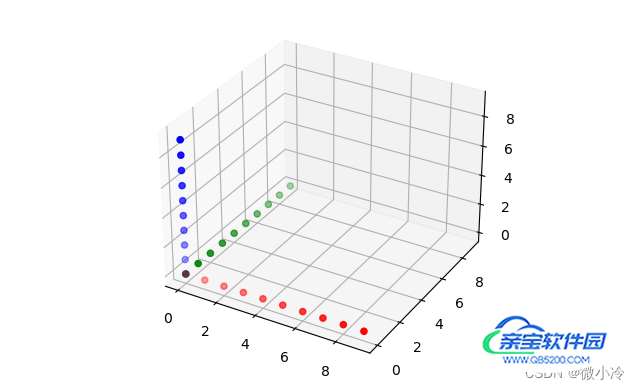
为了比较直观地展示旋转过程,这里通过散点来新建三个坐标轴,通过对这三个坐标轴的转动,来直观地展现转动矩阵对坐标变换的影响。
import numpy as np
import matplotlib.pyplot as plt
def setAxis(N, axis=0):
xs = np.arange(N)
ys = np.zeros_like(xs)
zs = np.zeros_like(xs)
if axis==0 : return [xs, ys, zs]
elif axis==1 : return [ys, xs, zs]
else: return [ys, zs, xs]
def drawAxis(X,Y,Z):
ax = plt.subplot(projection='3d')
ax.scatter(*X, c='r')
ax.scatter(*Y, c='g')
ax.scatter(*Z, c='b')
plt.show()
X = setAxis(10, 0)
Y = setAxis(10, 1)
Z = setAxis(10, 2)
drawAxis(X, Y, Z)
效果为
旋转矩阵与初步演示
欧拉角是用来唯一地确定定点转动刚体位置的三个一组独立角参量,由章动角θ、进动角ψ和自转角φ组成,为L.欧拉首先提出,故得名。
为了尽快进入演示部分,故对原理的介绍从略,仅从二维平面上的旋转矩阵出发,做一个简单的推导,而三维旋转矩阵,至少在形式上与二维是雷同的。
假设坐标系中有一个向量 ( x , y ),其模长为 ,角度为
,角度为 。若将其围绕坐标原点逆时针旋转 θ \theta θ,则其坐标变为
。若将其围绕坐标原点逆时针旋转 θ \theta θ,则其坐标变为

由于  ,则上式可以写为
,则上式可以写为
写成矩阵形式即为
也就是说,在平面直角坐标系上,向量绕原点顺时针旋转 θ \theta θ,相当于左乘一个旋转矩阵。
推广到三维,为了限制 x y xy xy坐标平面上的旋转,要将其旋转中心从原点扩展为绕着 z z z轴旋转,从而三维旋转矩阵可推广为

同理可得到绕三个轴转动的旋转矩阵,为了书写方便,记 ,可列出下表。
,可列出下表。

下面用lambda表达式来实现,用以描述单个轴的旋转过程。
import numpy as np
# 将角度转弧度后再求余弦
cos = lambda th : np.cos(np.deg2rad(th))
sin = lambda th : np.sin(np.deg2rad(th))
# 即 Rx(th) => Matrix
Rx = lambda th : np.array([
[1, 0, 0],
[0, cos(th), -sin(th)],
[0, sin(th), cos(th)]])
Ry = lambda th : np.array([
[cos(th), 0, sin(th)],
[0 , 1, 0],
[-sin(th), 0, cos(th)]
])
Rz = lambda th : np.array([
[cos(th) , sin(th), 0],
[-sin(th), cos(th), 0],
[0 , 0, 1]])
有了旋转矩阵,就可以旋转,接下来让坐标轴沿着三个轴分别旋转30°,其效果如下

代码如下
def drawAxis(X, Y, Z, fig, i):
ax = fig.add_subplot(1,3,i,projection='3d')
ax.plot(*X, c='r')
ax.plot(*Y, c='g')
ax.plot(*Z, c='b')
Xx, Yx, Zx = Rx(30) @ X, Rx(30) @ Y, Rx(30) @ Z
Xy, Yy, Zy = Ry(30) @ X, Ry(30) @ Y, Ry(30) @ Z
Xz, Yz, Zz = Rz(30) @ X, Rz(30) @ Y, Rz(30) @ Z
fig = plt.figure("rotate")
drawAxis(Xx, Yx, Zx, fig, 1)
drawAxis(Xy, Yy, Zy, fig, 2)
drawAxis(Xz, Yz, Zz, fig, 3)
plt.show()
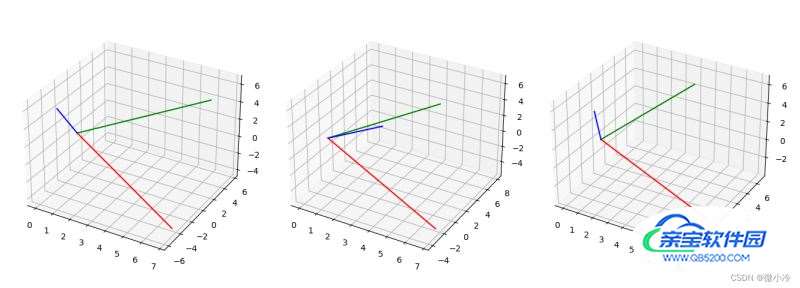
转动次序对旋转的影响
由于旋转被建模成了矩阵,而众所周知矩阵乘法是不可交换的,也就是说,就算绕着三个坐标轴旋转相同的角度,也会因为转动次序不同而引发不同的结果。
XYZ = [X, Y, Z]
R_xyz = [Rz(30) @ Ry(30) @ Rx(30) @ R for R in XYZ]
R_zyx = [Rx(30) @ Ry(30) @ Rz(30) @ R for R in XYZ]
R_yxz = [Rz(30) @ Rx(30) @ Ry(30) @ R for R in XYZ]
fig = plt.figure("rotate")
drawAxis(*R_xyz, fig, 1)
drawAxis(*R_zyx, fig, 2)
drawAxis(*R_yxz, fig, 3)
plt.show()
得到下图
动态演示旋转过程
30°的转动之后,坐标轴变得面目全非,接下来要做的就是动态绘制这三个坐标轴的旋转过程
from numpy.random import rand
from matplotlib import animation
Rot = [Rx, Ry, Rz]
# 根据指定坐标轴顺序来以指定角度旋转向量
def rotVec(vec, axis, degs):
for i in range(len(axis)):
vec = Rot[axis[i]](degs[i]) @ vec
return vec
# 若x在[a,b]区间,则对a取模,若小于a置0,大于b为b-a
def truncMod(x, a, b):
if x < a : return 0
elif x >= b : return b-a
else : return x%(b-a)
# 三个坐标轴
XYZ = [setAxis(10,i) for i in range(3)]
fig = plt.figure(figsize=(5,5))
ax = fig.add_subplot(projection='3d')
ax.grid()
lines = [ax.plot([],[],[], '-', lw=0.5, c=c)[0]
for c in 'rgb']
def animate(n):
# 按照xyz顺序旋转
axis = [2,1,0]
degs = [truncMod(n, st, st + 30) for st in [0,30,60]]
newXYZ = [rotVec(x, axis, degs) for x in XYZ]
for i in range(3):
lines[i].set_data(newXYZ[i][0],newXYZ[i][1])
lines[i].set_3d_properties(newXYZ[i][2])
return lines
ani = animation.FuncAnimation(fig, animate,
range(90), interval=50, blit=True)
#plt.show()
ani.save("zyx.gif")
效果如下
x-y-z
z-y-x
总结
加载全部内容