opencv图像倾斜校正
无左无右 人气:0
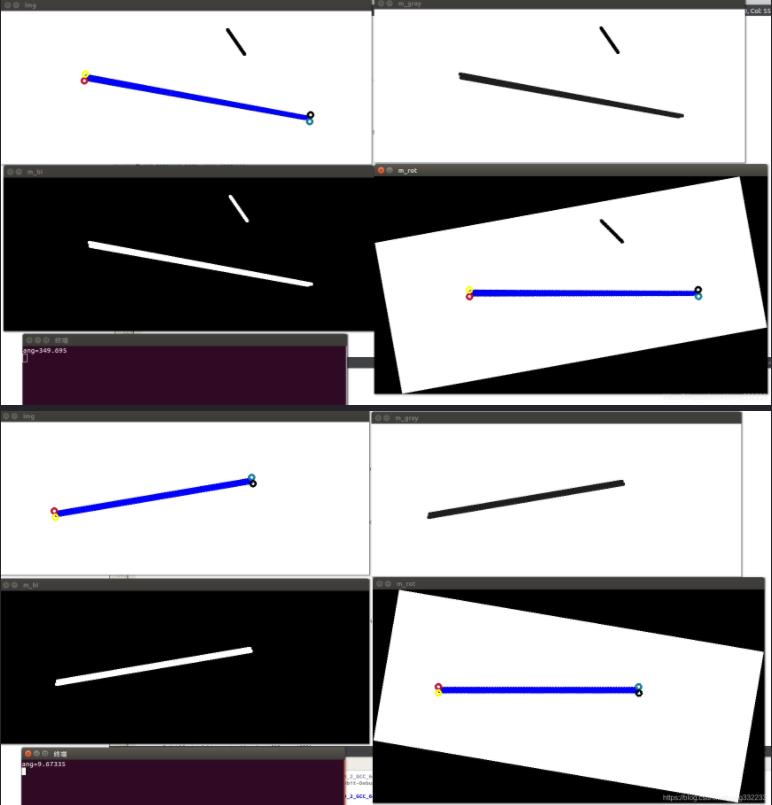
今天的任务是如图这两种情况,我现在的情况是和如图一样的,左图左边倾斜一点儿,那么我需要把左边压低倾斜校正。右图,右边倾斜我需要把右边下压到水平位置倾斜校正。我的场景不会有大角度的倾斜,就这么点可能的不会超过45°的小角度。
标准的传统图像处理方法。首先就是灰度,二值化,取轮廓,筛选得到目标(面积最大的那个),得到倾斜角度,转正。
具体过程就不详细说了,都在代码里面一看就懂。效果图如下:
#include <iostream>
#include"opencv2/opencv.hpp"
using namespace std;
using namespace cv;
bool cmp_x(cv::Point pt1, cv::Point pt2)
{
return (pt1.x < pt2.x);
}
cv::Point2f get_mid_pt(cv::Point2f pt1, cv::Point2f pt2)
{
return cv::Point2f((pt1.x + pt2.x)/2.0,(pt1.y + pt2.y) / 2.0);
}
double get_point_angle(cv::Point2f pointO,cv::Point2f pointA)
{
double angle = 0;
cv::Point2f point;
double temp;
point = cv::Point2f((pointA.x - pointO.x), (pointA.y - pointO.y));
if ((0==point.x) && (0==point.y))
{
return 0;
}
if (0==point.x)
{
angle = 90;
return angle;
}
if (0==point.y)
{
angle = 0;
return angle;
}
temp = fabsf(float(point.y)/float(point.x));
temp = atan(temp);
temp = temp*180/CV_PI ;
if ((0<point.x)&&(0<point.y))
{
angle = 360 - temp;
return angle;
}
if ((0>point.x)&&(0<point.y))
{
angle = 360 - (180 - temp);
return angle;
}
if ((0<point.x)&&(0>point.y))
{
angle = temp;
return angle;
}
if ((0>point.x)&&(0>point.y))
{
angle = 180 - temp;
return angle;
}
printf("sceneDrawing :: getAngle error!");
return -1;
}
int RotateImage(const cv::Mat &src, double angle, cv::Mat &dst, cv::Mat &rot_matrix, bool crop = true, int flags = cv::INTER_NEAREST,
int borderMode = cv::BORDER_CONSTANT, const cv::Scalar &borderValue = cv::Scalar())
{
if(0 == src.cols * src.rows) { return 0;}
cv::Point2f center(src.cols / 2.0f, src.rows / 2.0f);
rot_matrix = cv::getRotationMatrix2D(center, angle, 1.0);
if (crop) {
if (dst.data == NULL) {
dst = cv::Mat(src.rows, src.cols, src.type());
}
} else {
cv::Rect bbox = cv::RotatedRect(center, cv::Size2f(src.cols, src.rows), angle).boundingRect();
double *p = (double *) rot_matrix.data;
p[2] += bbox.width / 2.0 - center.x;
p[5] += bbox.height / 2.0 - center.y;
if (dst.rows != bbox.height || dst.cols != bbox.width) {
dst = cv::Mat(bbox.height, bbox.width, src.type());
}
}
cv::warpAffine(src, dst, rot_matrix, dst.size(), flags, borderMode, borderValue);
return 0;
}
int main(int argc, char *argv[])
{
cv::Mat img = cv::imread("/data_1/everyday/0325/13.jpeg");
cv::Mat m_gray,m_bi;
cv::cvtColor(img,m_gray,CV_BGR2GRAY);
cv::threshold(m_gray,m_bi,100,255,THRESH_BINARY_INV);
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(m_bi,contours,hierarchy,RETR_TREE,CHAIN_APPROX_SIMPLE,Point());
RotatedRect rt_rot_max,rt_tmp;
int max_szie = -1;
for(int i=0;i<contours.size();i++)
{
rt_tmp = minAreaRect(Mat(contours[i]));
if(rt_tmp.size.area() > max_szie)
{
max_szie = rt_tmp.size.area();
rt_rot_max = rt_tmp;
}
}
std::vector<cv::Point2f> v_pt(4);
rt_rot_max.points(v_pt.data());
std::sort(v_pt.begin(),v_pt.end(),cmp_x);
cv::Point2f pt_left = get_mid_pt(v_pt[0], v_pt[1]);
cv::Point2f pt_right = get_mid_pt(v_pt[2], v_pt[3]);
double ang = get_point_angle(pt_left,pt_right);
std::cout<<"ang="<<ang<<std::endl;
cv::circle(img,v_pt[0],6,Scalar(50,12,189),3);
cv::circle(img,v_pt[1],6,Scalar(10,255,255),3);
cv::circle(img,v_pt[2],6,Scalar(150,120,19),3);
cv::circle(img,v_pt[3],6,Scalar(0,0,0),3);
cv::Mat m_rot,rot_matrix;
RotateImage(img, -ang, m_rot, rot_matrix, false);
cv::imshow("m_rot",m_rot);
cv::imshow("m_bi",m_bi);
cv::imshow("m_gray",m_gray);
cv::imshow("img",img);
cv::waitKey(0);
return 0;
}
加载全部内容