OpenCV单目摄像头对图像目标测距
奶茶不加冰 人气:0使用opencv对单目摄像头中的目标实现测量距离(python实现),供大家参考,具体内容如下
1.方法介绍:
根据相似三角形的方法:
F = P×D / W , 其中W为物体的实际宽度,D为物体平面与相机平面的距离,照片上物体的像素宽度为P,相机焦距为F
D = F×W / P ,这样知道相机的内参焦距就可以求得物体平面与相机平面的距离D
2.代码:
import cv2
import imutils
import numpy as np
from imutils import paths
# 获取目标的轮廓信息
def find_marker(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) # 颜色空间转换函数,RGB和BGR颜色空间转换 opencv默认的颜色空间是BGR
gray = cv2.GaussianBlur(gray, (5, 5), 0) # 高斯滤波,对图像进行滤波操作 ,(5,5)表示高斯核的大小 ,0 表示标准差取0
edged = cv2.Canny(gray, 35, 125) # canny 算子 边缘检测 35是阈值1, 125是阈值2,大的阈值用于检测图像中的明显边缘,小的阈值用于将不明显的边缘检测连接起来
cnts = cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE) # 找到详细的轮廓点, RETR_LIST 以列表的形式输出轮廓信息
# CHAIN_APPROX_SIMPLE: 压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标
cnts = imutils.grab_contours(cnts) # 寻找图像的轮廓信息,输入图像为一个二值图像
c = max(cnts, key=cv2.contourArea) # 轮廓点的面积计算
# return edged
return cv2.minAreaRect(c) # 求出在 C点集下的像素点的面积
def get_F(W, D):
P = find_marker(image)[1][0] / 118.11 # 300dim 1cm = 118.11像素值
return (P*D) / W # F = get_F(2, 126) # 输出的值为cm f=24.003cm 焦距
def distance_to_camera(F, P, W):
return (F*W) / P # F 为相机的焦距,w为物体的宽度,P为物体在照片中的像素宽度,需要转换为cm
W = 2 # 需要手动测量目标的宽度,单位为cm
F = 24.00304 # 根据get_F求出 ,get_F()函数是为了求得相机的焦距,需要通过测试图像中的目标距离来求出
image = cv2.imread('065_5.jpg')
marker = find_marker(image)
P = marker[1][0] / 118.11 # 300dim 1cm = 118.11像素值 ,300dim指300分辨率,有1080分辨率,像素值的㎝转换是不同
inches = distance_to_camera(F, P, W) #
print('距离为:%.2f cm' % inches) # 单位为cm
# draw a bounding box around the image and display it
box = cv2.cv.BoxPoints(marker) if imutils.is_cv2() else cv2.boxPoints(marker)
box = np.int0(box)
cv2.drawContours(image, [box], -1, (0, 255, 0), 2)
cv2.putText(image, "%.2fft" % inches,
(image.shape[1] - 200, image.shape[0] - 20), cv2.FONT_HERSHEY_SIMPLEX,
2.0, (0, 255, 0), 3)
cv2.imshow("image", image)
cv2.waitKey(0)
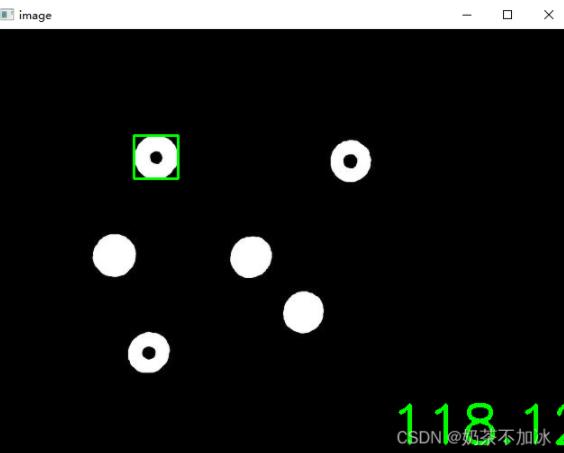
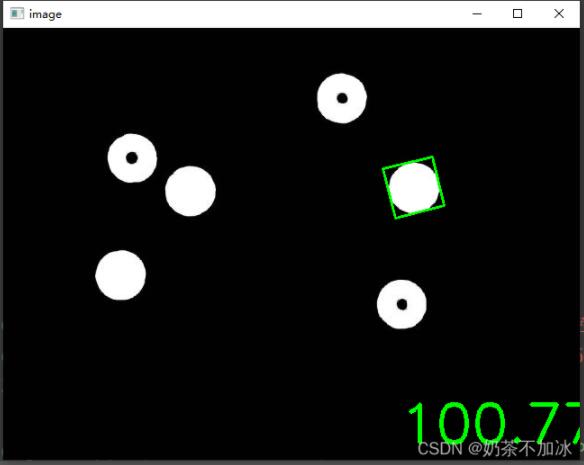
cv2.destroyAllWindows()3.效果验证
加载全部内容