OpenCV ORB角点检测
ʚVVcatɞ 人气:0ORB算法是FAST算法和BRIEF算法的结合,ORB可以用来对图像中的关键点快速创建特征向量,并用这些特征向量来识别图像中的对象。
实例化ORB
orb = cv.ORB_create(nfeatures)
参数:
- nfeatures:特征点的最大数量
利用orb.detectAndCompute()检测关键点并计算
kp, des = orb.detectAndCompute(gray, None)
参数:
- gray:进行关键点检测的图像(灰度图像)
返回:
- kp:关键点信息,包括位置,尺度,方向信息
- des:关键点描述符,每个关键点BRIEF特征向量,二进制字符串。
将关键点检测结果绘制在图像上
cv.drawKeypoints(image, keypoints, outputimage, color, flags)
参数:
- image: 原始图像
- keypoints:关键点信息,将其绘制在图像上
- outputimage:输出图片,可以是原始图像
- color:颜色设置,通过修改(b,g,r)的值,更改画笔的颜色,b=蓝色,g=绿色,r=红色。
- flags:绘图功能的标识设置
1、cv2.DRAW_MATCHES_FLAGS_DEFAULT:创建输出图像矩阵,使用现存的输出图像绘制匹配对和特征点,对每一个关键点只绘制中间。
2、cv2.DRAW_MATCHES_FLAGS_DRAW_OVER_OUTIMG:不创建输出图像矩阵,而是在输出图像上绘制匹配对。
3、cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS:对每一个特征点绘制带大小和方向的关键点图形。
4、cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS:单点的特征点不被绘制。
import cv2 as cv
from matplotlib import pyplot as plt
# 1.图像读取
img = cv.imread("1.jpg")
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 2.ORB角点检测
# 2.1实例化ORB对象
orb = cv.ORB_create(nfeatures=1000)
# 2.2 检测关键点,并计算特征描述符
kp, des = orb.detectAndCompute(gray, None)
print(des.shape)
# 3.将关键点检测在图像上
img2 = cv.drawKeypoints(img, kp, None, flags=0) # 也可以添加 color 参数指定图像显示关键点的颜色,例如 img2 = cv.drawKeypoints(img, kp, None, color=(0, 0, 255), flags=0)
# 4.绘制图像
plt.figure(figsize=(10, 8), dpi=100)
plt.imshow(img2[:, :, ::-1])
plt.xticks([]),
plt.yticks([])
plt.show()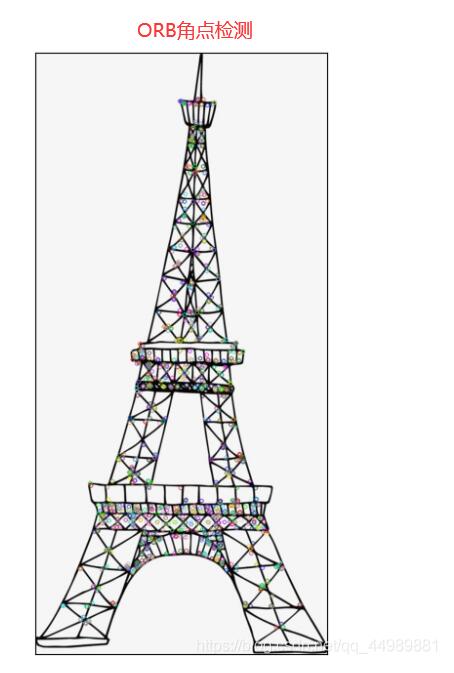
加载全部内容