opencv棋盘格检测
老王隔壁的秃头大宝贝 人气:0代码:
#include <iostream>
#include <vector>
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <opencv2/optflow/motempl.hpp>
using namespace cv;
using namespace std;
/*
棋盘格角点检测应用
*/
int main()
{
//*********************************** 1 ****************************************************************
/*Mat img = imread("C:\\Users\\H\\Desktop\\13.png", IMREAD_GRAYSCALE);
vector<Point2f> corner;
bool result = findChessboardCorners(img, Size(5, 7), corner, CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_NORMALIZE_IMAGE);
cornerSubPix(img, corner, Size(11, 11), Size(-1, -1), TermCriteria(TermCriteria::EPS | TermCriteria::MAX_ITER, 20, 0.03));
drawChessboardCorners(img, Size(5, 7), corner, result);
imshow("src", img);*/
//**********************************************************************************************************
// ********************************** 2 **************************************************
//读入图像
Mat src = imread("C:\\Users\\H\\Desktop\\13.png", IMREAD_COLOR);
Mat image_gray;
cvtColor(src, image_gray, COLOR_BGR2GRAY);
//定义存储角点的容器
vector<Point2f> corners;
//进行角点检测
bool ret = findChessboardCorners(image_gray,
Size(5, 7), // 棋盘格每列点数和每一行点数
corners, // 输出检测到角点的数组
CALIB_CB_ADAPTIVE_THRESH |
CALIB_CB_NORMALIZE_IMAGE);
//指定亚像素计算迭代标注
TermCriteria criteria = TermCriteria(TermCriteria::MAX_ITER + TermCriteria::EPS,
40, // 要计算的最大迭代次数或元素数
0.1); // 迭代算法停止时所需的精度或参数变化
//亚像素检测
cornerSubPix(image_gray,
corners,
Size(5, 5), //搜索窗口大小
Size(-1, -1),
criteria);
//角点绘制
drawChessboardCorners(src,
Size(5, 7), //棋盘格每列点数和每一行点数
corners,
ret);
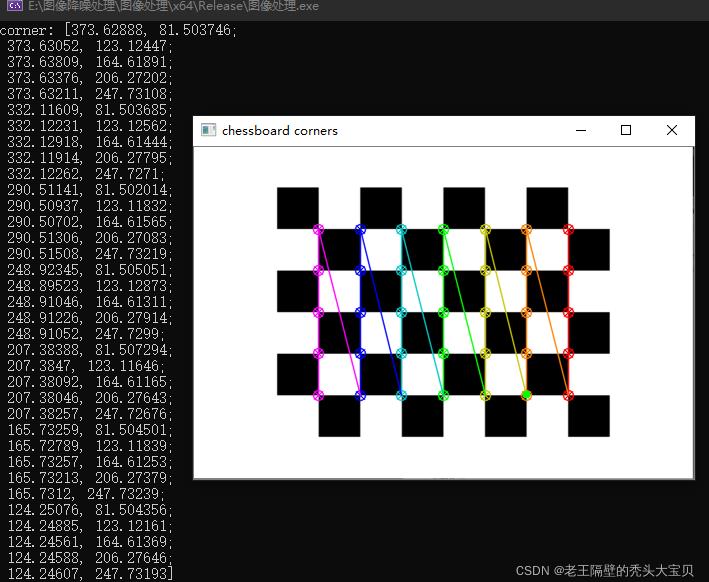
cout << "corner: " << corners << endl;
//在原图中绘制点
Point pt;
pt.x = corners[9].x;
pt.y = corners[9].y;
circle(src, pt, 4, Scalar(0, 255, 0),-1);
imshow("chessboard corners", src);
// ****************************************************************************************
waitKey(0);
return 0;
}结果展示:
加载全部内容