Visual Studio 2022 配置 PCL
ice_千秋 人气:0一、声明
个人目的是运用点云pcl,所以没有太深入,而且这仅仅只是我在安装过程中的一些经验总结,包括了一些需要注意的地方,以及个人觉得不错的教程推荐,如果有什么错误(当然都是自己新机操作实践过没有问题的)、不足还请多多包涵,不吝赐教(另外所有网盘的分享都不用去记或者copy提取码,自动填充的~)
1.1一些pcd文件分享
网站分享
1、

2、
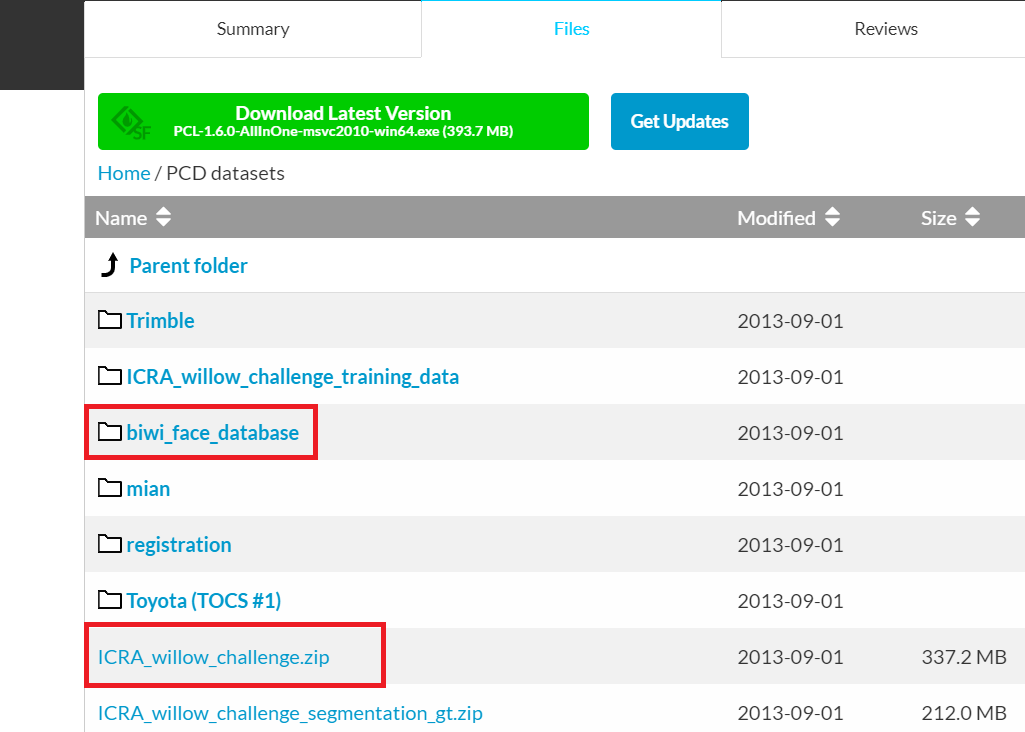
点击zip文件就会自动下载,文件夹里面还有zip文件
3、
网盘分享
链接: http://pan.baidu.com/s/1LTI1Szx5sRrArnBnOUQyRQ 提取码: j5pa
里面是上面网站中下载的,但是不全,后续或许会慢慢补上
单纯后面示例代码需要的rabbit.pcd
文件链接: http://pan.baidu.com/s/1unNJU9wA6rXP1jZqoXGkVg 提取码: bydj
二、初步操作
安装Visual Studio 和PCL
2.1安装pcl,OpenNI2:
各种教程里面这都很好,就不赘述了,当然,这里也给出一个个人认为不错的
PCL 1.12.1需要下载的文件
链接: http://pan.baidu.com/s/1f5XxRnpywRvGahLQhykTgg 提取码: c6wk
2.2环境变量:
环境变量添加以下路径:
(个人在使用目前没毛病)
D:\PCL 1.12.1\bin
D:\PCL 1.12.1\3rdParty\VTK\bin
D:\PCL 1.12.1\3rdParty\FLANN\bin
D:\PCL 1.12.1\3rdParty\Qhull\bin
D:\PCL 1.12.1\3rdParty\Boost\lib
D:\PCL 1.12.1\3rdParty\OpenNI2\Tools
D:\PCL 1.12.1\3rdParty\OpenNI2\Redist
安装完pcl会有这几个
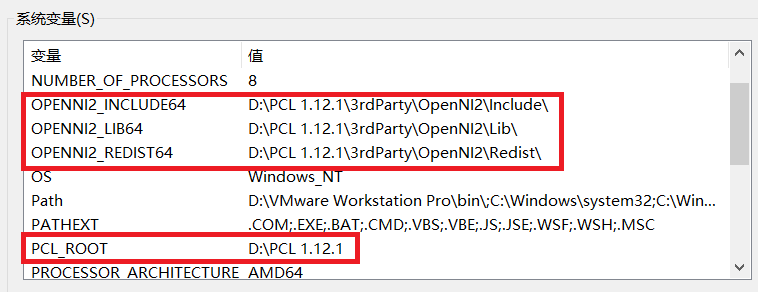
于是就有如下另外一种添加方法:
%PCL_ROOT%\bin
%PCL_ROOT%\3rdParty\VTK\bin
%PCL_ROOT%\3rdParty\FLANN\bin
%PCL_ROOT%\3rdParty\Qhull\bin
%PCL_ROOT%\3rdParty\OpenNI2\Tools
%OPENNI2_REDIST64%
%OPENNI2_LIB64%
%OPENNI2_INCLUDE64%
环境变量的修改教程里面也是有不同,本人也不是很懂┭┮﹏┭┮
第二种添加方法就是(一点个人见解,不排除错误的可能)
1、 D:\PCL 1.12.1\3rdParty\OpenNI2\Redist替换成 %OPENNI2_REDIST64%
2、D:\PCL 1.12.1 替换成__%PCL_ROOT%__
3、也就是用上面图片里面的值替换 变量
配置了系统环境变量后不会出现 找不到 .dll文件 的问题,并不需要在Visual Studio中执行打开属性页,选择配置属性 -> 调试 -> 环境,粘贴下面环境这一操作(值得注意的是,pcl的配置是可以永久配置的,但是永久配置的时候并没有以上在Visual Studio中配置环境的地方 (或许是有,但是我目前没有看到┭┮﹏┭┮) )
PATH=$(PCL_ROOT)\bin;$(PCL_ROOT)\3rdParty\FLANN\bin;$(PCL_ROOT)\3rdParty\VTK\bin;$(PCL_ROOT)\Qhull\bin;$(PCL_ROOT)\3rdParty\OpenNI2\Tools;$(PATH)
三、Visual Studio中的操作
需要 永久配置 \color{RED}{永久配置} 永久配置的可以先看看一下两个链接(看一个也行,看个人喜好视频还是文字),然后再去进行配置:
其中的核心点就是在属性管理器操作。
注意 \color{RED}{注意} 注意:可能在永久配置的时候属性管理器界面没有Microsoft.Cpp.x64.user,可以从下面下载,然后放到文件夹里面,路径在下面
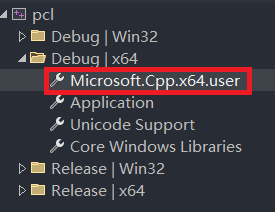
C:\Users\用户名\AppData\Local\Microsoft\MSBuild\v4.0//该文件的C盘地址
想要在C盘里面找到需要有如下操作:

链接: http://pan.baidu.com/s/1Bq7XECsM7Kka4zN37bs7lw 提取码: 6ie7
安装好之后机会在上面的目录下找到了,Visual Studio里面也会有了
3.1包含目录:
和后面的库目录相同的是,主要是看**D:\PCL 1.12.1(我的pcl安装目录)**后面的内容
如下是1.12.1版本的包含目录:
D:\PCL 1.12.1\3rdParty\Eigen\eigen3
D:\PCL 1.12.1\3rdParty\FLANN\include
D:\PCL 1.12.1\3rdParty\VTK\include\vtk-9.1
D:\PCL 1.12.1\3rdParty\Qhull\include
D:\PCL 1.12.1\include\pcl-1.12
D:\PCL 1.12.1\3rdParty\Boost\include\boost-1_78
D:\PCL 1.12.1\3rdParty\OpenNI2\Include
3.2 库目录:
如下是1.12.1版本的库目录:
D:\PCL 1.12.1\3rdParty\Boost\lib
D:\PCL 1.12.1\3rdParty\FLANN\lib
D:\PCL 1.12.1\3rdParty\OpenNI2\Lib
D:\PCL 1.12.1\3rdParty\Qhull\lib
D:\PCL 1.12.1\3rdParty\VTK\lib
D:\PCL 1.12.1\lib
3.3 附加依赖项:
参考以下链接自己获取依赖项,当然,各种教程里面都会有对应版本需要的依赖项,在此就不给出具体的了
VS中PCL库附加依赖项配置
当然上面最开始的链接里面也有自己获取的方法
3.4 预处理器定义:
这部分在最开始给出的教程链接里面没有,但是个人没有配置之前运行程序是走不通的,但是各种教程里面给出的预处理器定义也不尽相同(我也不懂其中奥妙┭┮﹏┭┮)以下采用一个片段即可
个人正在用的,目前测试能行
BOOST_USE_WINDOWS_H
NOMINMAX
_CRT_SECURE_NO_DEPRECATE
_SCL_SECURE_NO_WARNINGS
_CRT_SECURE_NO_WARNINGS
_CRT_SECURE_NO_WARNINGS
_SCL_SECURE_NO_WARNINGS
_SILENCE_FPOS_SEEKPOS_DEPRECATION_WARNING
_CRT_SECURE_NO_WARNINGS
BOOST_ALL_NO_LIB
BOOST_USE_WINDOWS_H
NOMINMAX
_SCL_SECURE_NO_WARNINGS
_SILENCE_FPOS_SEEKPOS_DEPRECATION_WARNING
3.5 SDL检查
SDL检查改为否
(单独做一个标题空着不太好看,哈哈)
3.6 测试代码
3.6.1 一个不需要点云文件的(官方给出的实例):
#include <iostream>
#include <pcl/point_types.h>
#include <pcl/filters/passthrough.h>
int
main (int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the cloud data
cloud->width = 5;
cloud->height = 1;
cloud->points.resize (cloud->width * cloud->height);
for (std::size_t i = 0; i < cloud->points.size (); ++i)
{
cloud->points[i].x = 1024 * rand () / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024 * rand () / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024 * rand () / (RAND_MAX + 1.0f);
}
std::cerr << "Cloud before filtering: " << std::endl;
for (std::size_t i = 0; i < cloud->points.size (); ++i)
std::cerr << " " << cloud->points[i].x << " "
<< cloud->points[i].y << " "
<< cloud->points[i].z << std::endl;
// Create the filtering object
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud);
pass.setFilterFieldName ("z");
pass.setFilterLimits (0.0, 1.0);
//pass.setFilterLimitsNegative (true);
pass.filter (*cloud_filtered);
std::cerr << "Cloud after filtering: " << std::endl;
for (std::size_t i = 0; i < cloud_filtered->points.size (); ++i)
std::cerr << " " << cloud_filtered->points[i].x << " "
<< cloud_filtered->points[i].y << " "
<< cloud_filtered->points[i].z << std::endl;
return (0);
}
运行结果:

3.6.2 一个需要点云文件的(直接将pcd文件放在工作目录下或许更方便):
#include<pcl/visualization/cloud_viewer.h>
#include<iostream>//标准C++库中的输入输出类相关头文件。
#include<pcl/io/io.h>
#include<pcl/io/pcd_io.h>//pcd 读写类相关的头文件。
#include<pcl/io/ply_io.h>
#include<pcl/point_types.h> //PCL中支持的点类型头文件。
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
char strfilepath[256] = "rabbit.pcd";//将这个改成自己的pcd文件就可以
if (-1 == pcl::io::loadPCDFile(strfilepath, *cloud)) //打开点云文件
{
std::cout << "error input!" << std::endl;
return -1;
}
std::cout << cloud->points.size() << std::endl;
pcl::visualization::CloudViewer viewer("Cloud Viewer"); //创建viewer对象
viewer.showCloud(cloud);
system("pause");
return 0;
}
运行结果(三个窗口,其中一个如下):

四、最后
如果有不足或者错误(关于错误:以上的都是自己新机操作实践过没有问题的,应该不会有什么错误),还请指正。
加载全部内容