OpenCV凸包检测凸缺陷
胖大海pyh 人气:21、凸包检测与凸缺陷定义
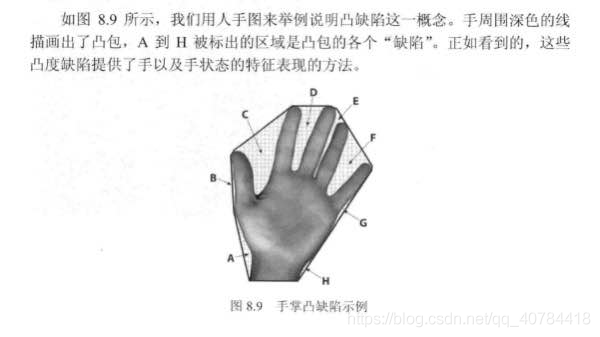
凸包是将最外层的点连接起来构成的凸多边形,它能包含点击中所有的点。物体的凸包检测常应用在物体识别、手势识别及边界检测等领域。
凸包检测常常用在轮廓分析之后。对二值图像进行轮廓分析之后,可以构建每个轮廓的凸包,构建完成之后会返回该凸包包含的点集。根据返回的凸包点集可以绘制该轮廓对应的凸包。一般来说,凸性曲线总是凸出来的,至少是平的。如果有地方凹进去了就被叫做凸性缺陷。
下图可以更加直接的了解凸包和凸缺陷的定义:
2、opencv相关实现函数
OpenCV中提供了函数convexHull 用于对物体轮廓凸包进行检测,函数convexityDefect进行凸缺陷的检测。首先来了解一下各参数意义:
hull = cv2.convexHull(points, clockwise, returnpoints)
各参数意义:
points:输入的轮廓点集
clockwise:方向标志,如果设置为True,输出的凸包是顺时针方向的,否则为逆时针方向。
returnPoints:是否返回点集
hull : 输出凸包结果,当参数returnPoints为ture的时候返回凸包的顶点坐标是个点集、returnPoints为false的是返回与凸包点对应的轮廓上的点对应的index
下面这个函数可以帮助我们找到凸缺陷:
convexityDefects = cv2.convexityDefect(contour, convexhull)
注意:
进行凸检测时,凸包检测中的returnPoints要设置为False
凸缺陷返回一个数组,每一行包含值是起点,终点,最远的点,到最远点的近似距离,返回的前三个点都是轮廓索引。
contour: 检测到的轮廓,可以调用findContours函数得到
convexhull:检测到的凸包,可以调用convexHull函数得到。
convexityDefects:输出参数,检测到的最终结果,返回一个数组,其中每一行包含的值是[起点,终点,最远的点,到最远点的近似距离]。前三个点都是轮廓索引。
前三个值得含义分别为:凸缺陷的起始点,凸缺陷的终点,凸缺陷的最深点(即边缘点到凸包距离最大点)
3、代码实践
我们可以在一张图上显示轮廓的凸包和凸缺陷。
我们将起点和终点用一条红线 连接,在最远点画一个蓝色的圆圈,要记住的是返回结果的前三个值是轮廓点的索引。 所以我们还要到轮廓点中去找它们。
前三个值得含义分别为:凸缺陷的起始点,凸缺陷的终点,凸缺陷的最深点(即边缘点到凸包距离最大点)。
凸包检测和凸缺陷检测的代码如下:
# 凸包检测和凸缺陷
import cv2 as cv
# 读取图像
src1 = cv.imread("000.jpg")
# 转换为灰度图像
gray = cv.cvtColor(src1, cv.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
# 获取结构元素
k = cv.getStructuringElement(cv.MORPH_RECT, (3, 3))
# 开操作
binary = cv.morphologyEx(binary, cv.MORPH_OPEN, k)
# 轮廓发现
contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
# 在原图上绘制轮廓,以方便和凸包对比,发现凸缺陷
cv.drawContours(src1, contours, -1, (0, 225, 0), 3)
for c in range(len(contours)):
# 是否为凸包
ret = cv.isContourConvex(contours[c])
# 凸缺陷
# 凸包检测,returnPoints为false的是返回与凸包点对应的轮廓上的点对应的index
hull = cv.convexHull(contours[c], returnPoints=False)
defects = cv.convexityDefects(contours[c], hull)
print('defects', defects)
for j in range(defects.shape[0]):
s, e, f, d = defects[j, 0]
start = tuple(contours[c][s][0])
end = tuple(contours[c][e][0])
far = tuple(contours[c][f][0])
# 用红色连接凸缺陷的起始点和终止点
cv.line(src1, start, end, (0, 0, 225), 2)
# 用蓝色最远点画一个圆圈
cv.circle(src1, far, 5, (225, 0, 0), -1)
# 显示
cv.imshow("result", src1)
cv.waitKey(0)
cv.destroyAllWindows()
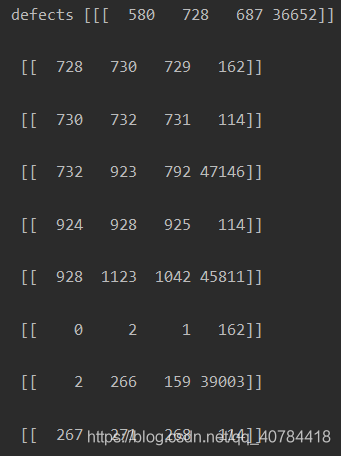
凸缺陷的部分输出:前三个为凸缺陷的起始点,凸缺陷的终点,凸缺陷的最深点(即边缘点到凸包距离最大点)。凸包检测输出的也是轮廓上的点的索引。
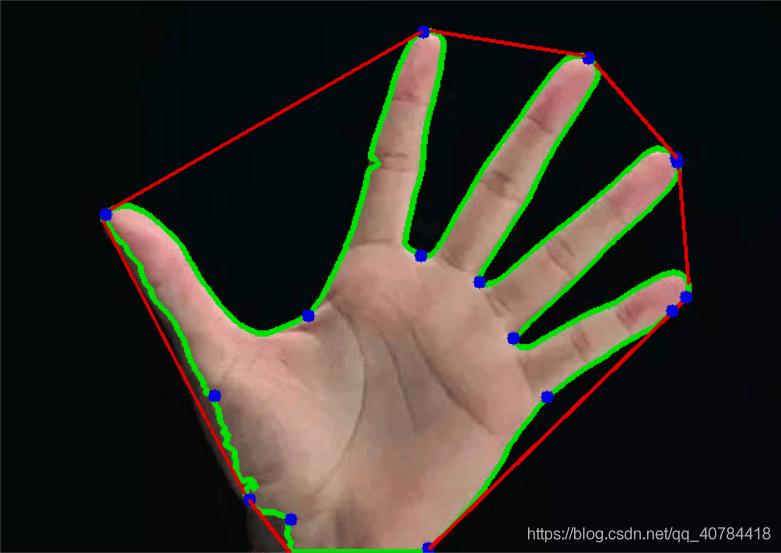
凸缺陷检测的效果图:
红色为凸包,蓝色点为凸缺陷的最深点(即边缘点到凸包距离最大点),绿色是轮廓。红色与绿色之间的区域即为凸缺陷。
4、总结
(1)cv2.convexityDefect函数进行凸缺陷检测时,凸包检测函数中cv2.convexHull中的returnPoints要设置为False,返回轮廓中与凸包点对应的轮廓点的index。
(2)cv2.convexityDefect函数的返回值是一系列数组,[凸缺陷的起点,凸缺陷的终点,凸缺陷的最深的点,到最远点的近似距离],前三个是索引值,终点和起点连接即得到凸包。
(3)凸缺陷的最深的点:即边缘点到凸包距离最大点到最远点的近似距离:边缘点到凸包的最大距离。
(4)利用凸包检测可以得到进一步的轮廓信息,可进行边界检测,结合凸缺陷可以实现手势识别和物体识别。
加载全部内容