C++ OpenCV网孔检测
Zero___Chen 人气:0前言
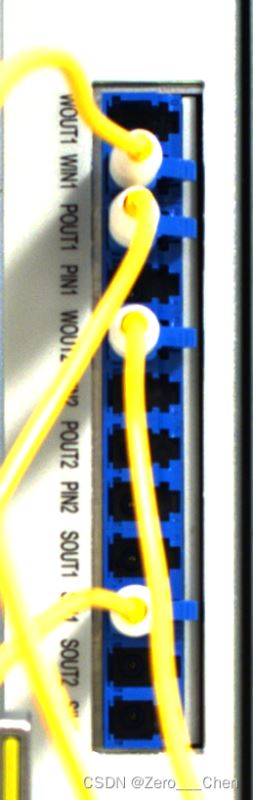
前段时间,有位粉丝私信我,给我发了一张图片,如下图所示:
在这里贴出他的原话。
从他给的图片分析,该图存在遮挡,所以不能简单的二值化,然后提取图像轮廓去寻找结果。所以,我就想如何去掉这些遮挡物(即图像修复)。从图像可知,该遮挡物是黄色的线,所以,我就想可否使用hsv色彩空间提取出黄色,然后得到二值掩模图像,最后对原图进行修复。接下来,就一起看看是如何一步步实现的吧。
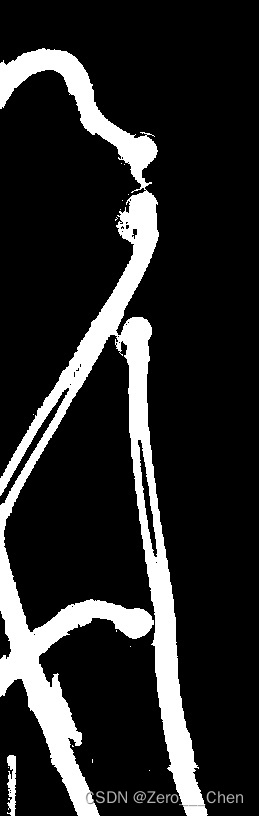
一、HSV通道转换
通过hsv通道转换,可以提取出图像中的黄色分量。
//hsv颜色通道转换,提取图像中黄色线部分,生成掩膜图像
Mat hsv;
cvtColor(src, hsv, COLOR_BGR2HSV);
Mat mask;
inRange(hsv, Scalar(10, 50, 255), Scalar(40, 255, 255), mask);
结果如图所示:
二、图像修复
关于图像修复的相关知识可以参考我之前的博文。这里就不细说了。
我们拿到上面的mask掩模图像,需要对其进行膨胀处理,使修复区域范围扩大。
//将生成的掩膜mask膨胀一下,使掩膜区域放大
Mat kernel = getStructuringElement(MORPH_RECT, Size(9, 9));
dilate(mask, mask, kernel);

接下来,需要对图像进行修复。这里我提供两种修复方法,一种是OpenCV提供的inpaint函数,一种是我自己写的。
2.1 OpenCV函数实现
//使用OpenCV自带的inpaint函数进行图像修复,得到目标图像
Mat inpaintImg;
inpaint(src, mask, inpaintImg, 1, INPAINT_NS);
效果如图所示。
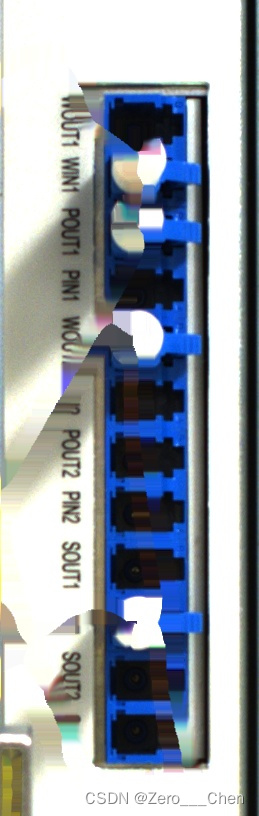
2.2 MyFunction
通过修改图像像素达到图像修复的效果。具体请看源码注释。
//自己写的算法,修改图像像素,完成图像修复
Mat canvas = Mat::zeros(src.size(), src.type());
int r = 1;//像素查找范围--表示在该像素点上下几行像素进行查找
for (int i = r; i < src.rows- r; i++)
{
for (int j = 0; j < src.cols; j++)
{
if (mask.at<uchar>(i, j) != 255)
{
//对于非掩膜区域,直接将原像素进行像素赋值
for (int c = 0; c < 3; c++)
{
canvas.at<Vec3b>(i, j)[c] = src.at<Vec3b>(i, j)[c];
}
}
else
{
//找到距离该掩膜像素点最近的非掩膜区域像素进行赋值
Point res = find_Nearest_Point(mask, i, j, r);
for (int c = 0; c < 3; c++)
{
canvas.at<Vec3b>(i, j)[c] = src.at<Vec3b>(res.x, res.y)[c];
}
}
}
}

效果如何所示
三、轮廓提取
接下来我们只需要对修复之后的图像进行轮廓提取就可以了。
//将修复之后的目标图像进行图像预处理,提取轮廓
Mat gray;
cvtColor(canvas, gray, COLOR_BGR2GRAY);
Mat gaussian;
GaussianBlur(gray, gaussian, Size(3, 3), 0);
Mat thresh;
threshold(gaussian, thresh, 30, 255, THRESH_BINARY_INV);
Mat kernel1 = getStructuringElement(MORPH_RECT, Size(3, 3));
morphologyEx(thresh, thresh, MORPH_OPEN, kernel);
//namedWindow("thresh", WINDOW_NORMAL);
//imshow("thresh", thresh);
//轮廓提取
vector<vector<Point>>contours;
findContours(thresh, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
//经过面积,外接矩形特征筛选出目标区域
vector<vector<Point>>EffectiveConts;
for (int i = 0; i < contours.size(); i++)
{
double area = contourArea(contours[i]);
if (area>100)
{
Rect rect = boundingRect(contours[i]);
if (double(rect.height) > 30 && double(rect.width) > 30)
{
EffectiveConts.push_back(contours[i]);
}
}
}
四、效果显示
for (int i = 0; i < EffectiveConts.size(); i++)
{
//计算轮廓矩
Moments Mo = moments(EffectiveConts[i]);
//计算质心--即插孔坐标
Point center = Point(Mo.m10 / Mo.m00, Mo.m01 / Mo.m00);
//效果绘制
Rect rect = boundingRect(EffectiveConts[i]);
rectangle(src, rect, Scalar(0, 255, 0), 5);
circle(src, center, 3, Scalar(0, 0, 255), -1);
}
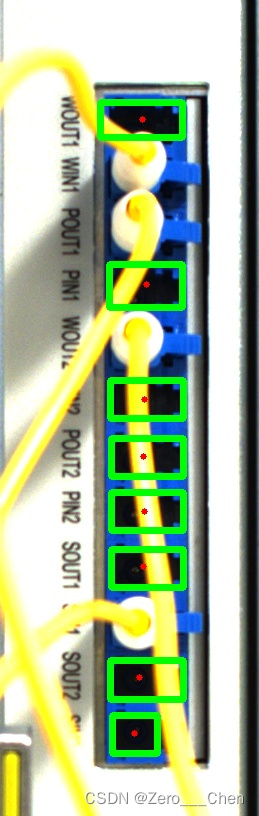
如图为该案例最终效果。
五、源码
#include<opencv2/opencv.hpp>
#include <iostream>
#include<opencv2/photo.hpp>
using namespace std;
using namespace cv;
double EuDis(Point pt1, Point pt2)
{
return sqrt(pow(pt1.x - pt2.x, 2) + pow(pt1.y - pt2.y, 2));
}
Point find_Nearest_Point(Mat mask , int currentrow, int currentcol, int r)
{
double mindis = 100000.0;
Point res(0,0);
//查找该像素点上下r行像素,找到最接近该像素的非掩膜区域像素
for (int i = currentrow - r; i < currentrow + r; i++)
{
for (int j = 0; j < mask.cols; j++)
{
if (mask.at<uchar>(i, j) != 255)
{
//Point(currentrow, currentcol) 表示当前需要赋值的掩膜像素点
double dis = EuDis(Point(currentrow, currentcol), Point(i, j));
if (dis < mindis)
{
mindis = dis;
res = Point(i, j); //目标像素点
}
}
}
}
return res;
}
int main()
{
Mat src = imread("test.jpg");
if (src.empty())
{
cout << "No Image!" << endl;
system("pause");
return -1;
}
//hsv颜色通道转换,提取图像中黄色线部分,生成掩膜图像
Mat hsv;
cvtColor(src, hsv, COLOR_BGR2HSV);
Mat mask;
inRange(hsv, Scalar(10, 50, 255), Scalar(40, 255, 255), mask);
//将生成的掩膜mask膨胀一下,使掩膜区域放大
Mat kernel = getStructuringElement(MORPH_RECT, Size(9, 9));
dilate(mask, mask, kernel);
//使用OpenCV自带的inpaint函数进行图像修复,得到目标图像
//Mat inpaintImg;
//inpaint(src, mask, inpaintImg, 1, INPAINT_NS);
//namedWindow("inpaintImg", WINDOW_NORMAL);
//imshow("inpaintImg", inpaintImg);
//自己写的算法,修改图像像素,完成图像修复
Mat canvas = Mat::zeros(src.size(), src.type());
int r = 1;//像素查找范围--表示在该像素点上下几行像素进行查找
for (int i = r; i < src.rows- r; i++)
{
for (int j = 0; j < src.cols; j++)
{
if (mask.at<uchar>(i, j) != 255)
{
//对于非掩膜区域,直接将原像素进行像素赋值
for (int c = 0; c < 3; c++)
{
canvas.at<Vec3b>(i, j)[c] = src.at<Vec3b>(i, j)[c];
}
}
else
{
//找到距离该掩膜像素点最近的非掩膜区域像素进行赋值
Point res = find_Nearest_Point(mask, i, j, r);
for (int c = 0; c < 3; c++)
{
canvas.at<Vec3b>(i, j)[c] = src.at<Vec3b>(res.x, res.y)[c];
}
}
}
}
//namedWindow("canvas", WINDOW_NORMAL);
//imshow("canvas", canvas);
//将修复之后的目标图像进行图像预处理,提取轮廓
Mat gray;
cvtColor(canvas, gray, COLOR_BGR2GRAY);
Mat gaussian;
GaussianBlur(gray, gaussian, Size(3, 3), 0);
Mat thresh;
threshold(gaussian, thresh, 30, 255, THRESH_BINARY_INV);
Mat kernel1 = getStructuringElement(MORPH_RECT, Size(3, 3));
morphologyEx(thresh, thresh, MORPH_OPEN, kernel);
//namedWindow("thresh", WINDOW_NORMAL);
//imshow("thresh", thresh);
//轮廓提取
vector<vector<Point>>contours;
findContours(thresh, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
//经过面积,外接矩形特征筛选出目标区域
vector<vector<Point>>EffectiveConts;
for (int i = 0; i < contours.size(); i++)
{
double area = contourArea(contours[i]);
if (area>100)
{
Rect rect = boundingRect(contours[i]);
if (double(rect.height) > 30 && double(rect.width) > 30)
{
EffectiveConts.push_back(contours[i]);
}
}
}
for (int i = 0; i < EffectiveConts.size(); i++)
{
//计算轮廓矩
Moments Mo = moments(EffectiveConts[i]);
//计算质心--即插孔坐标
Point center = Point(Mo.m10 / Mo.m00, Mo.m01 / Mo.m00);
//效果绘制
Rect rect = boundingRect(EffectiveConts[i]);
rectangle(src, rect, Scalar(0, 255, 0), 5);
circle(src, center, 3, Scalar(0, 0, 255), -1);
}
namedWindow("src", WINDOW_NORMAL);
imshow("src", src);
waitKey(0);
system("pause");
return 0;
}
总结
本文使用OpenCV C++实现网孔检测,主要操作有以下几点。
1、hsv通道转换,提取出黄色分量,得到掩模图像。
2、利用掩模图像对原图进行图像修复。
3、通过轮廓提取定位网孔位置。
加载全部内容