OpenCV相机标定
czhzasui 人气:0一、OpenCV标定的几个常用函数
findChessboardCorners() 棋盘格角点检测
bool findChessboardCorners( InputArray image,
Size patternSize,
OutputArray corners,
int flags = CALIB_CB_ADAPTIVE_THRESH +
CALIB_CB_NORMALIZE_IMAGE );
第一个参数是输入的棋盘格图像(可以是8位单通道或三通道图像);
第二个参数是棋盘格内部的角点的行列数(注意:不是棋盘格的行列数,如棋盘格的行列数分别为4、8,而内部角点的行列数分别是3、7,因此这里应该指定为cv::Size(3, 7));
第三个参数是检测到的棋盘格角点,类型为std::vectorcv::Point2f。
第四个参数flag,用于指定在检测棋盘格角点的过程中所应用的一种或多种过滤方法,可以使用下面的一种或多种,如果都是用则使用OR:
- cv::CALIB_CB_ADAPTIVE_THRESH:使用自适应阈值将图像转化成二值图像
- cv::CALIB_CB_NORMALIZE_IMAGE:归一化图像灰度系数(用直方图均衡化或者自适应阈值)
- cv::CALIB_CB_FILTER_QUADS:在轮廓提取阶段,使用附加条件排除错误的假设
- cv::CALIB_CV_FAST_CHECK:快速检测
cv::drawChessboardCorners() 棋盘格角点的绘制
drawChessboardCorners( InputOutputArray image,
Size patternSize,
InputArray corners,
bool patternWasFound );
- image为8-bit,三通道图像
- patternSize,每一行每一列的角
- corners,已经检测到的角
- patternWasFound,findChessboardCorners的返回值
find4QuadCornerSubpix() 对粗提取的角点进行精确化
find4QuadCornerSubpix( InputArray img,
InputOutputArray corners,
Size region_size );
- image源图像
- corners,提供角点的初始坐标
- region_size: 搜索窗口的一般尺寸
cornerSubPix() 亚像素检测
void cornerSubPix( InputArray image,
InputOutputArray corners,
Size winSize,
Size zeroZone,
TermCriteria criteria );
- image源图像
- corners,提供角点的初始坐标,返回更加精确的点
- winSize,搜索窗口的一般尺寸,如果winSize=Size(5,5),则search windows为11*11
- winSize,死区的一般尺寸,用来避免自相关矩阵的奇点,(-1,-1)表示没有死区
- criteria,控制迭代次数和精度
calibrateCamera() 求解摄像机的内在参数和外在参数
double calibrateCamera( InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints,
Size imageSize,
InputOutputArray cameraMatrix,
InputOutputArray distCoeffs,
OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs,
int flags = 0,
TermCriteria criteria = TermCriteria(TermCriteria::COUNT +
TermCriteria::EPS, 30, DBL_EPSILON) );
objectPoints,世界坐标,用vector<vector>,输入x,y坐标,z坐标为0
imagePoints,图像坐标,vector<vector>
imageSize,图像的大小用于初始化标定摄像机的image的size
cameraMatrix,内参数矩阵
distCoeffs,畸变矩阵
rvecs,位移向量
tvecs,旋转向量
flags,可以组合:
CV_CALIB_USE_INTRINSIC_GUESS:使用该参数时,将包含有效的fx,fy,cx,cy的估计值的内参矩阵cameraMatrix,作为初始值输入,然后函数对其做进一步优化。如果不使用这个参数,用图像的中心点初始化光轴点坐标(cx, cy),使用最小二乘估算出fx,fy(这种求法好像和张正友的论文不一样,不知道为何要这样处理)。注意,如果已知内部参数(内参矩阵和畸变系数),就不需要使用这个函数来估计外参,可以使用solvepnp()函数计算外参数矩阵。
CV_CALIB_FIX_PRINCIPAL_POINT:在进行优化时会固定光轴点,光轴点将保持为图像的中心点。当CV_CALIB_USE_INTRINSIC_GUESS参数被设置,保持为输入的值。
CV_CALIB_FIX_ASPECT_RATIO:固定fx/fy的比值,只将fy作为可变量,进行优化计算。当
CV_CALIB_USE_INTRINSIC_GUESS没有被设置,fx和fy的实际输入值将会被忽略,只有fx/fy的比值被计算和使用。
CV_CALIB_ZERO_TANGENT_DIST:切向畸变系数(P1,P2)被设置为零并保持为零。
CV_CALIB_FIX_K1,…,CV_CALIB_FIX_K6:对应的径向畸变系数在优化中保持不变。如果设置了CV_CALIB_USE_INTRINSIC_GUESS参数,就从提供的畸变系数矩阵中得到。否则,设置为0。
CV_CALIB_RATIONAL_MODEL(理想模型):启用畸变k4,k5,k6三个畸变参数。使标定函数使用有理模型,返回8个系数。如果没有设置,则只计算其它5个畸变参数。
CALIB_THIN_PRISM_MODEL (薄棱镜畸变模型):启用畸变系数S1、S2、S3和S4。使标定函数使用薄棱柱模型并返回12个系数。如果不设置标志,则函数计算并返回只有5个失真系数。
CALIB_FIX_S1_S2_S3_S4 :优化过程中不改变薄棱镜畸变系数S1、S2、S3、S4。如果cv_calib_use_intrinsic_guess设置,使用提供的畸变系数矩阵中的值。否则,设置为0。
CALIB_TILTED_MODEL (倾斜模型):启用畸变系数tauX and tauY。标定函数使用倾斜传感器模型并返回14个系数。如果不设置标志,则函数计算并返回只有5个失真系数。
CALIB_FIX_TAUX_TAUY :在优化过程中,倾斜传感器模型的系数不被改变。如果cv_calib_use_intrinsic_guess设置,从提供的畸变系数矩阵中得到。否则,设置为0。
initUndistortRectifyMap() 计算畸变参数
void initUndistortRectifyMap(InputArray cameraMatrix,
InputArray distCoeffs,
InputArray R,
InputArray newCameraMatrix,
Size size,
int m1type,
OutputArray map1,
OutputArray map2)
- cameraMatrix,摄像机内参数矩阵
- distCoeffs, 摄像机的5个畸变系数,(k1,k2,p1,p2[,k3[,k4,k5,k6]])
- R,在客观空间中的转换对象
- newCameraMatrix,新的3*3的浮点型矩矩阵
- size,为失真图像的大小
- m1type,第一个输出的map,类型为CV_32FC1或CV_16SC2
- map1,x映射函数
- map2,y映射函数
二、绘制棋盘格,拍摄照片
这里自己画一个棋盘格用作标定,长度为1280像素,宽490像素,横向10方格,纵向7方格
std_cb = Vision::makeCheckerboard(1280, 490, 10, 7, 0, (char *)"../blizzard/res/calibration/std_cb.png");
效果如图
Vision是我个人创建的视觉类,可以用来绘制标准的棋盘格。
头文件vision.h
//
// Created by czh on 18-10-16.
//
#ifndef OPENGL_PRO_VISION_H
#define OPENGL_PRO_VISION_H
#include "opencv2/opencv.hpp"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgcodecs/imgcodecs.hpp>
#include "iostream"
class Vision {
public:
static cv::Mat read(std::string file_path, int flags = cv::IMREAD_ANYCOLOR | cv::IMREAD_ANYDEPTH);
static cv::Mat write(std::string file_path, int flags = cv::IMREAD_ANYCOLOR | cv::IMREAD_ANYDEPTH);
static void dispConfig(cv::Mat img);
static cv::Mat makeCheckerboard(int bkgWidth, int bkgHeight, int sqXnum, int sqYnum = 0, int borderThickness = 0, char *savePath = NULL);
private:
};
#endif //OPENGL_PRO_VISION_H
源文件vision.cpp
//
// Created by czh on 18-10-16.
//
#include "vision.h"
#include "string.h"
using namespace std;
using namespace cv;
const char *findName(const char *ch) {
const char *name = strrchr(ch, '/');
return ++name;
}
cv::Mat Vision::read(std::string file_path, int flags) {
printf("#Vision read\n");
cv::Mat img;
img = cv::imread(file_path, flags);
if (img.data == NULL) {
printf("\tError:vision read\n");
} else {
dispConfig(img);
}
return img;
}
void Vision::dispConfig(cv::Mat img) {
printf("\tpixel:%d*%d, channels:%d\n", img.size().width, img.size().height, img.channels());
}
cv::Mat Vision::makeCheckerboard(int bkgWidth, int bkgHeight, int sqXnum, int sqYnum, int thickNum, char *savePath) {
if(sqYnum == 0){
sqYnum = sqXnum;
}
if(savePath == NULL){
char *defaultPath = (char *)"../res/calibration/maths.png";
savePath = defaultPath;
}
int checkboardX = 0;//棋盘x坐标
int checkboardY = 0;//棋盘y坐标
int xLen = bkgWidth / sqXnum;//x方格长度
int yLen = bkgHeight / sqYnum;//y方格长度
cv::Mat img(bkgHeight + thickNum * 2, bkgWidth + thickNum * 2, CV_8UC4, cv::Scalar(0, 255, 255, 255));
for (int i = 0; i < img.rows; i++) {
for (int j = 0; j < img.cols; j++) {
if (i < thickNum || i >= thickNum + bkgHeight || j < thickNum || j >= thickNum + bkgWidth) {
img.at<Vec<uchar, 4>>(i, j) = cv::Scalar(0, 0, 0, 255);
continue;
}
checkboardX = j - thickNum;
checkboardY = i - thickNum;
if (checkboardY / yLen % 2 == 0) {
if ((checkboardX) / xLen % 2 == 0) {
img.at<Vec<uchar, 4>>(i, j) = cv::Scalar(255, 255, 255, 255);
} else {
img.at<Vec<uchar, 4>>(i, j) = cv::Scalar(0, 0, 0, 255);
}
}
else{
if ((checkboardX) / xLen % 2 != 0) {
img.at<Vec<uchar, 4>>(i, j) = cv::Scalar(255, 255, 255, 255);
} else {
img.at<Vec<uchar, 4>>(i, j) = cv::Scalar(0, 0, 0, 255);
}
}
}
}
imwrite(savePath, img); //保存生成的图片
printf("#makeCheckerboard %d*%d\n", bkgWidth + thickNum, bkgHeight + thickNum);
return img;
}
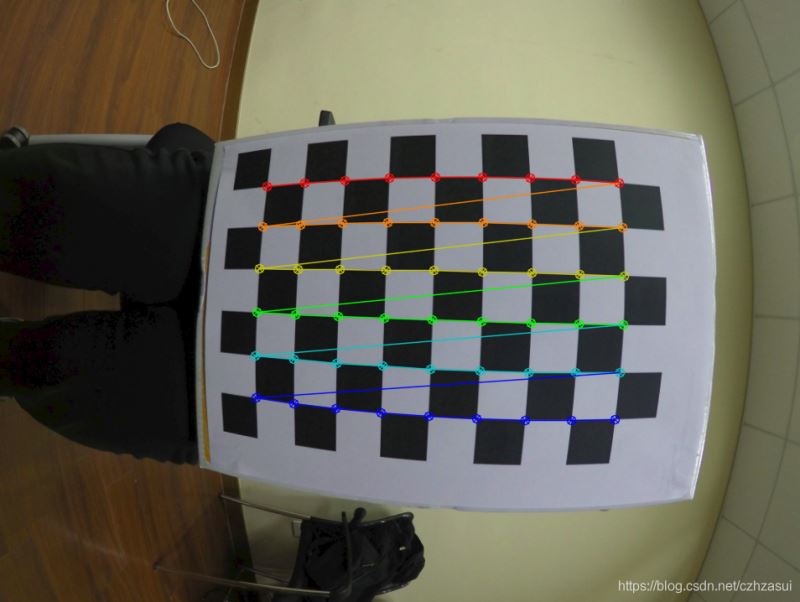
用A4纸打印棋盘格,相机拍摄照片。
我偷懒,拿了别人的标定照片

三、相机标定
下面是相机标定代码
cv::imwrite("../blizzard/res/calibration/cb_source.png", cb_source);
printf("#Start scan corner\n");
cv::Mat img;
std::vector<cv::Point2f> image_points;
std::vector<std::vector<cv::Point2f>> image_points_seq; /* 保存检测到的所有角点 */
if (cv::findChessboardCorners(cb_source, cv::Size(aqXnum, aqYnum), image_points, 0) == 0) {
printf("#Error: Corners not find ");
return 0;
} else {
cvtColor(cb_source, img, CV_RGBA2GRAY);
cv::imwrite("../blizzard/res/calibration/cb_gray.png", img);
//find4QuadCornerSubpix(img, image_points, cv::Size(5, 5));
cv::cornerSubPix(img, image_points, cv::Size(11, 11), cv::Size(-1, -1),
cv::TermCriteria(CV_TERMCRIT_ITER + CV_TERMCRIT_EPS, 30, 0.01));
image_points_seq.push_back(image_points);
cv::Mat cb_corner;
cb_corner = cb_source.clone();
drawChessboardCorners(cb_corner, cv::Size(aqXnum, aqYnum), image_points, true);
cv::imwrite("../blizzard/res/calibration/cb_corner.png", cb_corner);
}
printf("#Start calibrate\n");
cv::Size square_size = cv::Size(14.2222, 12);
std::vector<std::vector<cv::Point3f>> object_points; /* 保存标定板上角点的三维坐标 */
cv::Mat cameraMatrix = cv::Mat(3, 3, CV_32FC1, cv::Scalar::all(0)); /* 摄像机内参数矩阵 */
cv::Mat distCoeffs = cv::Mat(1, 5, CV_32FC1, cv::Scalar::all(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */
std::vector<cv::Mat> tvecsMat; /* 每幅图像的旋转向量 */
std::vector<cv::Mat> rvecsMat; /* 每幅图像的平移向量 */
std::vector<cv::Point3f> realPoint;
for (int i = 0; i < aqYnum; i++) {
for (int j = 0; j < aqXnum; j++) {
cv::Point3f tempPoint;
/* 假设标定板放在世界坐标系中z=0的平面上 */
tempPoint.x = i * square_size.width;
tempPoint.y = j * square_size.height;
tempPoint.z = 0;
realPoint.push_back(tempPoint);
}
}
object_points.push_back(realPoint);
printf("#objectPoints: %ld\n", sizeof(object_points[0]));
std::cout << object_points[0] << std::endl;
printf("#image_points: %ld\n", sizeof(image_points_seq[0]));
std::cout << image_points << std::endl;
printf("#image size\n");
std::cout << SCREEN_WIDTH << "*" << SCREEN_HEIGHT << std::endl;
cv::calibrateCamera(object_points, image_points_seq, cb_source.size(), cameraMatrix, distCoeffs, rvecsMat, tvecsMat,
CV_CALIB_FIX_K3);
std::cout << "tvecsMat:\n" << tvecsMat[0] << std::endl;
std::cout << "rvecsMat:\n" << rvecsMat[0] << std::endl;
std::cout << "#cameraMatrix:\n" << cameraMatrix << std::endl;
std::cout << "#distCoeffs:\n" << distCoeffs << std::endl;
四、对图片进行校正
cv::Mat cb_final;
cv::Mat mapx = cv::Mat(cb_source.size(), CV_32FC1);
cv::Mat mapy = cv::Mat(cb_source.size(), CV_32FC1);
cv::Mat R = cv::Mat::eye(3, 3, CV_32F);
//initUndistortRectifyMap(cameraMatrix, distCoeffs, R, cv::Mat(), cb_source.size(), CV_32FC1,
// mapx, mapy);
//cv::remap(cb_source, cb_final, mapx, mapy, cv::INTER_LINEAR);
undistort(cb_source, cb_final, cameraMatrix, distCoeffs);
cv::imwrite("../blizzard/res/calibration/cb_final.png", cb_final);
1.校正前的图片
2.校正后的图片

总结
加载全部内容