OpenCV 背景分离 OpenCV实现背景分离(证件照背景替换)
翟天保Steven 人气:0本文主要介绍了OpenCV实现背景分离(证件照背景替换),具有一定的参考价值,感兴趣的可以了解一下
实现原理
图像背景分离是常见的图像处理方法之一,属于图像分割范畴。如何较优地提取背景区域,难点在于两个:
- 背景和前景的分割。针对该难点,通过人机交互等方法获取背景色作为参考值,结合差值均方根设定合理阈值,实现前景的提取,PS上称为蒙版;提取过程中,可能会遇到前景像素丢失的情况,对此可通过开闭运算或者提取外部轮廓线的方式,将前景内部填充完毕。
- 前景边缘轮廓区域的融合。如果不能很好地融合,就能看出明显的抠图痕迹,所以融合是很关键的一步。首先,对蒙版区(掩膜)进行均值滤波,其边缘区会生成介于0-255之间的缓存区;其次,通过比例分配的方式对缓存区的像素点上色,我固定的比例为前景0.3背景0.7,因为背景为单色区,背景比例高,可以使得缓存区颜色倾向于背景区,且实现较好地过渡;最后,蒙版为0的区域上背景色,蒙版为255的区域不变。
至此,图像实现了分割,完成背景分离。C++实现代码如下。
功能函数代码
// 背景分离
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input)
{
cv::Mat bgra, mask;
// 转化为BGRA格式,带透明度,4通道
cvtColor(src, bgra, COLOR_BGR2BGRA);
mask = cv::Mat::zeros(bgra.size(), CV_8UC1);
int row = src.rows;
int col = src.cols;
// 异常数值修正
input.p.x = max(0, min(col, input.p.x));
input.p.y = max(0, min(row, input.p.y));
input.thresh = max(5, min(100, input.thresh));
input.transparency = max(0, min(255, input.transparency));
input.size = max(0, min(30, input.size));
// 确定背景色
uchar ref_b = src.at<Vec3b>(input.p.y, input.p.x)[0];
uchar ref_g = src.at<Vec3b>(input.p.y, input.p.x)[1];
uchar ref_r = src.at<Vec3b>(input.p.y, input.p.x)[2];
// 计算蒙版区域(掩膜)
for (int i = 0; i < row; ++i)
{
uchar *m = mask.ptr<uchar>(i);
uchar *b = src.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if ((geiDiff(b[3*j],b[3*j+1],b[3*j+2],ref_b,ref_g,ref_r)) >input.thresh)
{
m[j] = 255;
}
}
}
// 寻找轮廓,作用是填充轮廓内黑洞
vector<vector<Point>> contour;
vector<Vec4i> hierarchy;
// RETR_TREE以网状结构提取所有轮廓,CHAIN_APPROX_NONE获取轮廓的每个像素
findContours(mask, contour, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(mask, contour, -1, Scalar(255), FILLED,4);
// 闭运算
cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(5, 5));
cv::morphologyEx(mask, mask, MORPH_CLOSE, element);
// 掩膜滤波,是为了边缘虚化
cv::blur(mask, mask, Size(2 * input.size+1, 2 * input.size + 1));
// 改色
for (int i = 0; i < row; ++i)
{
uchar *r = bgra.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
// 蒙版为0的区域就是标准背景区
if (m[j] == 0)
{
r[4 * j] = uchar(input.color[0]);
r[4 * j + 1] = uchar(input.color[1]);
r[4 * j + 2] = uchar(input.color[2]);
r[4 * j + 3] = uchar(input.transparency);
}
// 不为0且不为255的区域是轮廓区域(边缘区),需要虚化处理
else if (m[j] != 255)
{
// 边缘处按比例上色
int newb = (r[4 * j] * m[j] * 0.3 + input.color[0] * (255 - m[j])*0.7) / ((255 - m[j])*0.7+ m[j] * 0.3);
int newg = (r[4 * j+1] * m[j] * 0.3 + input.color[1] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newr = (r[4 * j + 2] * m[j] * 0.3 + input.color[2] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newt = (r[4 * j + 3] * m[j] * 0.3 + input.transparency * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
newb = max(0, min(255, newb));
newg = max(0, min(255, newg));
newr = max(0, min(255, newr));
newt = max(0, min(255, newt));
r[4 * j] = newb;
r[4 * j + 1] = newg;
r[4 * j + 2] = newr;
r[4 * j + 3] = newt;
}
}
}
return bgra;
}
C++测试代码
#include <opencv2/opencv.hpp>
#include <iostream>
#include <algorithm>
#include <time.h>
using namespace cv;
using namespace std;
// 输入参数
struct Inputparama {
int thresh = 30; // 背景识别阈值,该值越小,则识别非背景区面积越大,需有合适范围,目前为5-60
int transparency = 255; // 背景替换色透明度,255为实,0为透明
int size = 7; // 非背景区边缘虚化参数,该值越大,则边缘虚化程度越明显
cv::Point p = cv::Point(0, 0); // 背景色采样点,可通过人机交互获取,也可用默认(0,0)点颜色作为背景色
cv::Scalar color = cv::Scalar(255, 255, 255); // 背景色
};
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input);
// 计算差值均方根
int geiDiff(uchar b,uchar g,uchar r,uchar tb,uchar tg,uchar tr)
{
return int(sqrt(((b - tb)*(b - tb) + (g - tg)*(g - tg) + (r - tr)*(r - tr))/3));
}
int main()
{
cv::Mat src = imread("111.jpg");
Inputparama input;
input.thresh = 100;
input.transparency = 255;
input.size = 6;
input.color = cv::Scalar(0, 0, 255);
clock_t s, e;
s = clock();
cv::Mat result = BackgroundSeparation(src, input);
e = clock();
double dif = e - s;
cout << "time:" << dif << endl;
imshow("original", src);
imshow("result", result);
imwrite("result1.png", result);
waitKey(0);
return 0;
}
// 背景分离
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input)
{
cv::Mat bgra, mask;
// 转化为BGRA格式,带透明度,4通道
cvtColor(src, bgra, COLOR_BGR2BGRA);
mask = cv::Mat::zeros(bgra.size(), CV_8UC1);
int row = src.rows;
int col = src.cols;
// 异常数值修正
input.p.x = max(0, min(col, input.p.x));
input.p.y = max(0, min(row, input.p.y));
input.thresh = max(5, min(100, input.thresh));
input.transparency = max(0, min(255, input.transparency));
input.size = max(0, min(30, input.size));
// 确定背景色
uchar ref_b = src.at<Vec3b>(input.p.y, input.p.x)[0];
uchar ref_g = src.at<Vec3b>(input.p.y, input.p.x)[1];
uchar ref_r = src.at<Vec3b>(input.p.y, input.p.x)[2];
// 计算蒙版区域(掩膜)
for (int i = 0; i < row; ++i)
{
uchar *m = mask.ptr<uchar>(i);
uchar *b = src.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if ((geiDiff(b[3*j],b[3*j+1],b[3*j+2],ref_b,ref_g,ref_r)) >input.thresh)
{
m[j] = 255;
}
}
}
// 寻找轮廓,作用是填充轮廓内黑洞
vector<vector<Point>> contour;
vector<Vec4i> hierarchy;
// RETR_TREE以网状结构提取所有轮廓,CHAIN_APPROX_NONE获取轮廓的每个像素
findContours(mask, contour, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(mask, contour, -1, Scalar(255), FILLED,4);
// 闭运算
cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(5, 5));
cv::morphologyEx(mask, mask, MORPH_CLOSE, element);
// 掩膜滤波,是为了边缘虚化
cv::blur(mask, mask, Size(2 * input.size+1, 2 * input.size + 1));
// 改色
for (int i = 0; i < row; ++i)
{
uchar *r = bgra.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
// 蒙版为0的区域就是标准背景区
if (m[j] == 0)
{
r[4 * j] = uchar(input.color[0]);
r[4 * j + 1] = uchar(input.color[1]);
r[4 * j + 2] = uchar(input.color[2]);
r[4 * j + 3] = uchar(input.transparency);
}
// 不为0且不为255的区域是轮廓区域(边缘区),需要虚化处理
else if (m[j] != 255)
{
// 边缘处按比例上色
int newb = (r[4 * j] * m[j] * 0.3 + input.color[0] * (255 - m[j])*0.7) / ((255 - m[j])*0.7+ m[j] * 0.3);
int newg = (r[4 * j+1] * m[j] * 0.3 + input.color[1] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newr = (r[4 * j + 2] * m[j] * 0.3 + input.color[2] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newt = (r[4 * j + 3] * m[j] * 0.3 + input.transparency * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
newb = max(0, min(255, newb));
newg = max(0, min(255, newg));
newr = max(0, min(255, newr));
newt = max(0, min(255, newt));
r[4 * j] = newb;
r[4 * j + 1] = newg;
r[4 * j + 2] = newr;
r[4 * j + 3] = newt;
}
}
}
return bgra;
}
测试效果

图1 原图和红底色效果图对比
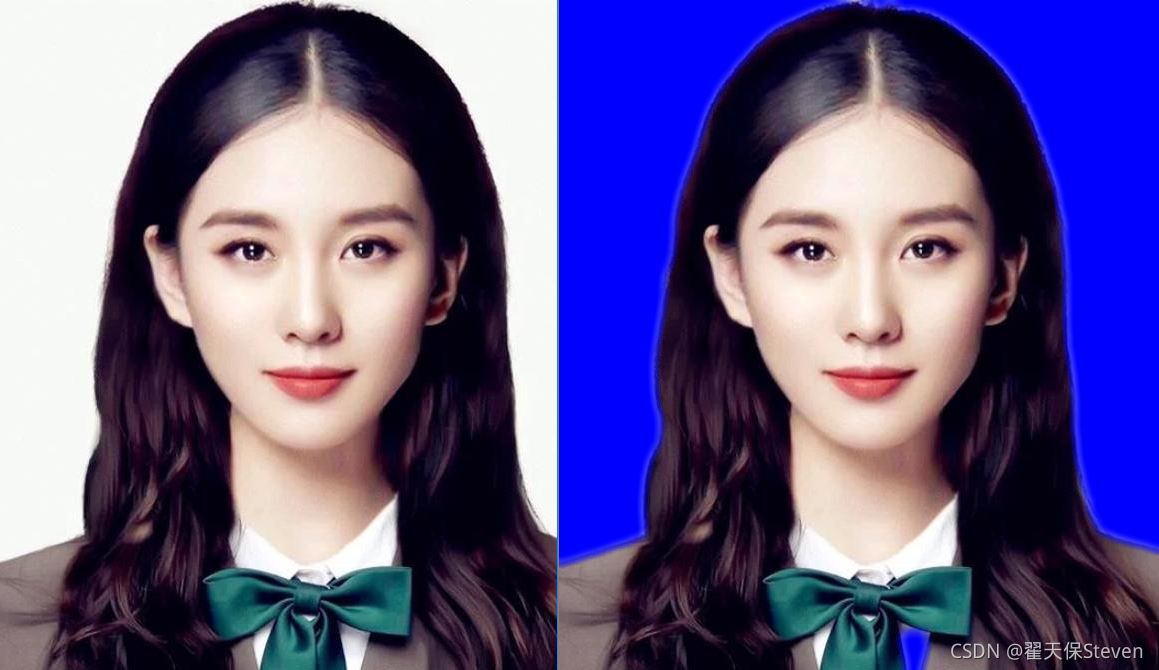
图2 原图和蓝底色效果图对比

图3 原图和透明底色效果图对比
如源码所示,函数输入参数共有5项,其说明如下:
- thresh为背景识别阈值,该值范围为5-100,用来区分背景区和前景区,合理设置,不然可能出现前景区大片面积丢失的情况。
- p为背景色采样点,可通过人机交互的方式人为选中背景区颜色,默认为图像原点的颜色。
- color为重绘背景色。
- transparency为重绘背景色的透明度,255为实色,0为全透明。
- size为边缘虚化参数,控制均值滤波的窗口尺寸,范围为0-30。
我对比了百度搜索证件照一键改色网站的效果,基本一致,它们处理一次4块钱,我们这是免费的,授人以鱼不如授人以渔对吧,学到就是赚到。当然人家的功能肯定更强大,估计集成了深度学习一类的框架,我们还需要调参。美中不足的地方就由兄弟们一起改进了。
细心的biliy发现了我贴图的问题,如图1图2图3所示,领口处被当做背景色了,这样当然不行,接下来开始改进功能。
1)首先分析原因,之所以领口被当做背景色,是因为领口为白色,同背景色一致,且连接图像边缘处,进行轮廓分析时,错将这个领口识别为轮廓外,如图4所示。

图4 识别失败
2)正如图4所示,仅仅用闭运算是无法有效补偿的,如果将窗口尺寸加大还可能使其他位置过度填充,接下来考虑如何只填充这类大洞。先将处理图像的宽高各扩展50个pixel,这样做的好处是令轮廓的识别更精准和清晰,并且避免了头顶处因贴近图像边缘,而导致的过度膨胀现象。
cv::Mat tmask = cv::Mat::zeros(row + 50, col + 50, CV_8UC1); mask.copyTo(tmask(cv::Range(25, 25 + mask.rows), cv::Range(25, 25 + mask.cols)));
3)之后进行黑帽运算,即闭运算减原图,得到图5。

图5 黑帽运算
4)用Clear_MicroConnected_Area函数清除小面积连通区,得到图6。
(该函数介绍见:https:)

图6 清除小面积连通区
5)黑帽运算结果加至原轮廓图,并截取实际图像尺寸。
// 黑帽运算获取同背景色类似的区域,识别后填充 cv::Mat hat; cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(31, 31)); cv::morphologyEx(tmask, hat, MORPH_BLACKHAT, element); hat.setTo(255, hat > 0); cv::Mat hatd; // 清除小面积区域 Clear_MicroConnected_Areas(hat, hatd, 450); tmask = tmask + hatd; // 截取实际尺寸 mask = tmask(cv::Range(25, 25 + mask.rows), cv::Range(25, 25 + mask.cols)).clone();
6)至此,就得到完整的轮廓了,如图7所示,完整代码见后方。
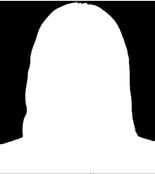
图7 完整轮廓图
完整改进代码
#include <opencv2/opencv.hpp>
#include <iostream>
#include <algorithm>
#include <time.h>
using namespace cv;
using namespace std;
// 输入参数
struct Inputparama {
int thresh = 30; // 背景识别阈值,该值越小,则识别非背景区面积越大,需有合适范围,目前为5-60
int transparency = 255; // 背景替换色透明度,255为实,0为透明
int size = 7; // 非背景区边缘虚化参数,该值越大,则边缘虚化程度越明显
cv::Point p = cv::Point(0, 0); // 背景色采样点,可通过人机交互获取,也可用默认(0,0)点颜色作为背景色
cv::Scalar color = cv::Scalar(255, 255, 255); // 背景色
};
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input);
void Clear_MicroConnected_Areas(cv::Mat src, cv::Mat &dst, double min_area);
// 计算差值均方根
int geiDiff(uchar b,uchar g,uchar r,uchar tb,uchar tg,uchar tr)
{
return int(sqrt(((b - tb)*(b - tb) + (g - tg)*(g - tg) + (r - tr)*(r - tr))/3));
}
int main()
{
cv::Mat src = imread("111.jpg");
Inputparama input;
input.thresh = 100;
input.transparency = 255;
input.size = 6;
input.color = cv::Scalar(0, 0, 255);
clock_t s, e;
s = clock();
cv::Mat result = BackgroundSeparation(src, input);
e = clock();
double dif = e - s;
cout << "time:" << dif << endl;
imshow("original", src);
imshow("result", result);
imwrite("result1.png", result);
waitKey(0);
return 0;
}
// 背景分离
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input)
{
cv::Mat bgra, mask;
// 转化为BGRA格式,带透明度,4通道
cvtColor(src, bgra, COLOR_BGR2BGRA);
mask = cv::Mat::zeros(bgra.size(), CV_8UC1);
int row = src.rows;
int col = src.cols;
// 异常数值修正
input.p.x = max(0, min(col, input.p.x));
input.p.y = max(0, min(row, input.p.y));
input.thresh = max(5, min(200, input.thresh));
input.transparency = max(0, min(255, input.transparency));
input.size = max(0, min(30, input.size));
// 确定背景色
uchar ref_b = src.at<Vec3b>(input.p.y, input.p.x)[0];
uchar ref_g = src.at<Vec3b>(input.p.y, input.p.x)[1];
uchar ref_r = src.at<Vec3b>(input.p.y, input.p.x)[2];
// 计算蒙版区域(掩膜)
for (int i = 0; i < row; ++i)
{
uchar *m = mask.ptr<uchar>(i);
uchar *b = src.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if ((geiDiff(b[3*j],b[3*j+1],b[3*j+2],ref_b,ref_g,ref_r)) >input.thresh)
{
m[j] = 255;
}
}
}
cv::Mat tmask = cv::Mat::zeros(row + 50, col + 50, CV_8UC1);
mask.copyTo(tmask(cv::Range(25, 25 + mask.rows), cv::Range(25, 25 + mask.cols)));
// 寻找轮廓,作用是填充轮廓内黑洞
vector<vector<Point>> contour;
vector<Vec4i> hierarchy;
// RETR_TREE以网状结构提取所有轮廓,CHAIN_APPROX_NONE获取轮廓的每个像素
findContours(tmask, contour, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(tmask, contour, -1, Scalar(255), FILLED,16);
// 黑帽运算获取同背景色类似的区域,识别后填充
cv::Mat hat;
cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(31, 31));
cv::morphologyEx(tmask, hat, MORPH_BLACKHAT, element);
hat.setTo(255, hat > 0);
cv::Mat hatd;
Clear_MicroConnected_Areas(hat, hatd, 450);
tmask = tmask + hatd;
mask = tmask(cv::Range(25, 25 + mask.rows), cv::Range(25, 25 + mask.cols)).clone();
// 掩膜滤波,是为了边缘虚化
cv::blur(mask, mask, Size(2 * input.size+1, 2 * input.size + 1));
// 改色
for (int i = 0; i < row; ++i)
{
uchar *r = bgra.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
// 蒙版为0的区域就是标准背景区
if (m[j] == 0)
{
r[4 * j] = uchar(input.color[0]);
r[4 * j + 1] = uchar(input.color[1]);
r[4 * j + 2] = uchar(input.color[2]);
r[4 * j + 3] = uchar(input.transparency);
}
// 不为0且不为255的区域是轮廓区域(边缘区),需要虚化处理
else if (m[j] != 255)
{
// 边缘处按比例上色
int newb = (r[4 * j] * m[j] * 0.3 + input.color[0] * (255 - m[j])*0.7) / ((255 - m[j])*0.7+ m[j] * 0.3);
int newg = (r[4 * j+1] * m[j] * 0.3 + input.color[1] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newr = (r[4 * j + 2] * m[j] * 0.3 + input.color[2] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newt = (r[4 * j + 3] * m[j] * 0.3 + input.transparency * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
newb = max(0, min(255, newb));
newg = max(0, min(255, newg));
newr = max(0, min(255, newr));
newt = max(0, min(255, newt));
r[4 * j] = newb;
r[4 * j + 1] = newg;
r[4 * j + 2] = newr;
r[4 * j + 3] = newt;
}
}
}
return bgra;
}
void Clear_MicroConnected_Areas(cv::Mat src, cv::Mat &dst, double min_area)
{
// 备份复制
dst = src.clone();
std::vector<std::vector<cv::Point> > contours; // 创建轮廓容器
std::vector<cv::Vec4i> hierarchy;
// 寻找轮廓的函数
// 第四个参数CV_RETR_EXTERNAL,表示寻找最外围轮廓
// 第五个参数CV_CHAIN_APPROX_NONE,表示保存物体边界上所有连续的轮廓点到contours向量内
cv::findContours(src, contours, hierarchy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE, cv::Point());
if (!contours.empty() && !hierarchy.empty())
{
std::vector<std::vector<cv::Point> >::const_iterator itc = contours.begin();
// 遍历所有轮廓
while (itc != contours.end())
{
// 定位当前轮廓所在位置
cv::Rect rect = cv::boundingRect(cv::Mat(*itc));
// contourArea函数计算连通区面积
double area = contourArea(*itc);
// 若面积小于设置的阈值
if (area < min_area)
{
// 遍历轮廓所在位置所有像素点
for (int i = rect.y; i < rect.y + rect.height; i++)
{
uchar *output_data = dst.ptr<uchar>(i);
for (int j = rect.x; j < rect.x + rect.width; j++)
{
// 将连通区的值置0
if (output_data[j] == 255)
{
output_data[j] = 0;
}
}
}
}
itc++;
}
}
}
改进效果

图8 原图与红底对比图

图9 原图与蓝底对比图
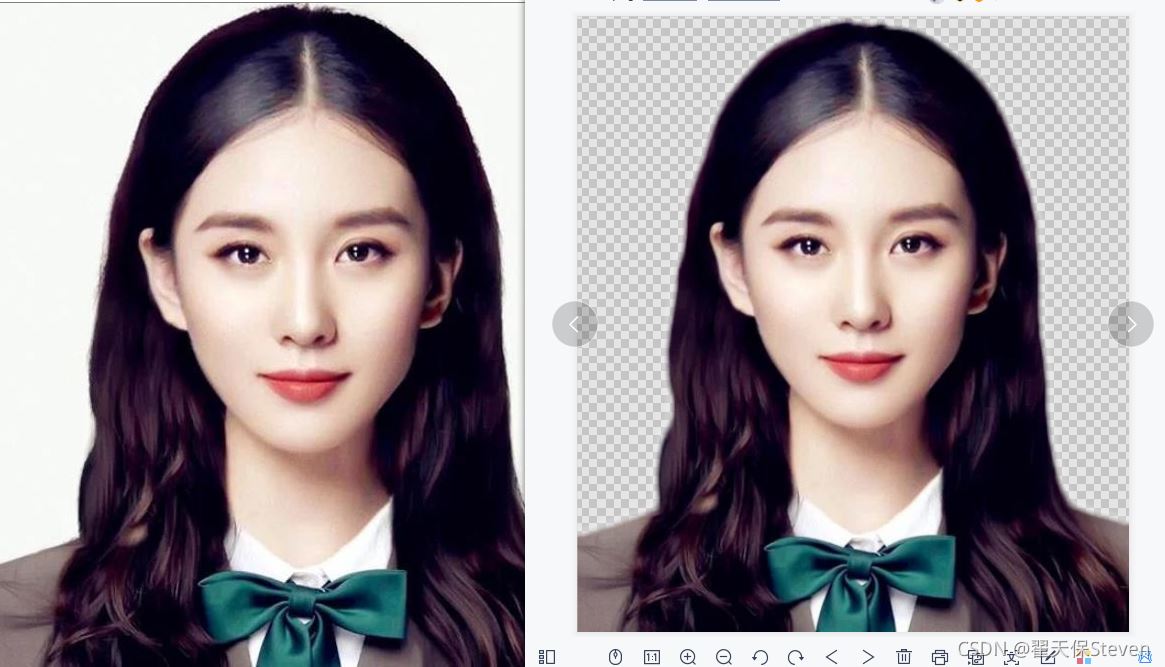
图10 原图与透明底对比图
加载全部内容