Python图像处理之图像清晰度评价
夏天是冰红茶 人气:00、实现效果
能够通过一张标准图,对同一组相机拍摄的照片进行清晰度评价。
1、概述
图像清晰度是用来指导调焦机构找到正焦位置的评价函数。理想的清晰度评价曲线类似于泊松分布,请看下图:
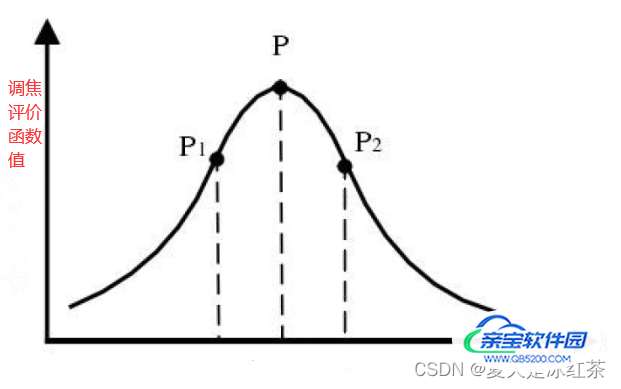
p点对应于正焦位置,P1 和P2 为正焦位置焦前和焦后采集到图像的清晰度评价结果。
正焦的图像比模糊的离焦图像边缘要更加的锐利清晰,相应的边缘像素灰度值变化大,因而会有更大的梯度值,从数学的角度来看图像,它是二维的离散矩阵,利用梯度函数可获取图像的灰度信息,来判别图像的清晰度,在离散信中梯度表现为差分形式。
2、模糊度分类
1、运动模糊
运动模糊是在捕获图像时,快门在打开时间内成像系统和拍摄 对象的短暂相对运动,造成成像在某个方向上形成的模糊。
2、压缩模糊
压缩模糊是图像在进行有损压缩丢失部分信息。
3、高斯模糊
高斯模糊是人为引入的一种模糊,使用高斯低通滤波器对原始图像进行滤波得到的。
3、清晰度量化指标
Brenner
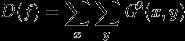
Brenner梯度函数是最简单的梯度评价函数,它只是简单的计算相邻两个像素灰度差的平方,该函数定义如下:

f(x,y) 表示图像f对应像素点(x,y)的灰度值,D(f)为图像清晰度计算结果。
python实现:
def brenner(img):
'''
:param img:narray 二维灰度图像
:return: int 图像越清晰越大
'''
shapes = np.shape(img)
output = 0
for x in range(0, shapes[0]-2):
for y in range(0, shapes[1]):
output+=(int(img[x+2,y])-int(img[x,y]))**2
return output
能量梯度函数(Energy of Gradient)
将 x 方向和 y 方向的相邻像素的灰度值之差的平方和作为每个像素点的梯度值,对所有像素梯度值累加作为清晰度评价函数值,表达式如下所示:

python实现:
def EOG(img):
'''
:param img:narray 二维灰度图像
:return: int 图像越清晰越大
'''
shapes = np.shape(img)
output = 0
for x in range(0, shapes[0]-1):
for y in range(0, shapes[1]-1):
output+=((int(img[x+1,y])-int(img[x,y]))**2+(int(img[x,y+1])-int(img[x,y]))**2)
return output
Roberts
Roberts函数与能量梯度函数相似,它是利用对角方向像素点灰度值之差。将4个相邻像素点的灰度值交叉相减的平方和作为每个像素点的梯度值,对所有像素梯度值累加作为清晰度评价函数值,表达式如下式所示:

python实现:
def Roberts(img):
'''
:param img:narray 二维灰度图像
:return: int 图像越清晰越大
'''
shapes = np.shape(img)
output = 0
for x in range(0, shapes[0]-1):
for y in range(0, shapes[1]-1):
output+=((int(img[x+1,y+1])-int(img[x,y]))**2+(int(img[x+1,y])-int(img[x,y+1]))**2)
return output
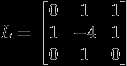
Laplace
采用Laplace算子与图像各个像素点的灰度值进行卷积得到一个梯度矩阵记为,取各像素点梯度的平方和作为评价函数,如下式所示:

python实现:
def Laplacian(img):
'''
:param img:narray 二维灰度图像
:return: int 图像越清晰越大
'''
return cv2.Laplacian(img,cv2.CV_64F).var()
由于之前推导过,你可以查看此文,这是我以前所写的一篇博客:图像处理:边缘检测原理
SMD(灰度方差)函数
当完全聚焦时,图像最清晰,图像中的高频分量也最多,故可将灰度变化作为聚焦评价的依据,灰度方差法的公式如下:

python实现:
def SMD(img):
'''
:param img:narray 二维灰度图像
:return: int 图像越清晰越大
'''
shape = np.shape(img)
output = 0
for x in range(1, shape[0]-1):
for y in range(0, shape[1]):
output+=math.fabs(int(img[x,y])-int(img[x,y-1]))
output+=math.fabs(int(img[x,y]-int(img[x+1,y])))
return output
SMD2 (灰度方差乘积)函数
SDM函数具有较好的计算性能,但其缺点也很明显,即在焦点附近灵敏度不高,即该函数在极值点附近过于平坦,从而导致聚焦精度难以提高。在《一种快速高灵敏度聚焦评价函数》中李郁峰等人在论文中提出了一种新的评价函数,称之为灰度方差乘积法,即对每一个像素领域两个灰度差相乘后再逐个像素累加,该函数定义如下:

python实现:
def SMD2(img):
'''
:param img:narray 二维灰度图像
:return: int 图像约清晰越大
'''
shape = np.shape(img)
output = 0
for x in range(0, shape[0]-1):
for y in range(0, shape[1]-1):
output+=math.fabs(int(img[x,y])-int(img[x+1,y]))*math.fabs(int(img[x,y]-int(img[x,y+1])))
return output
4、图像清晰度评价实现
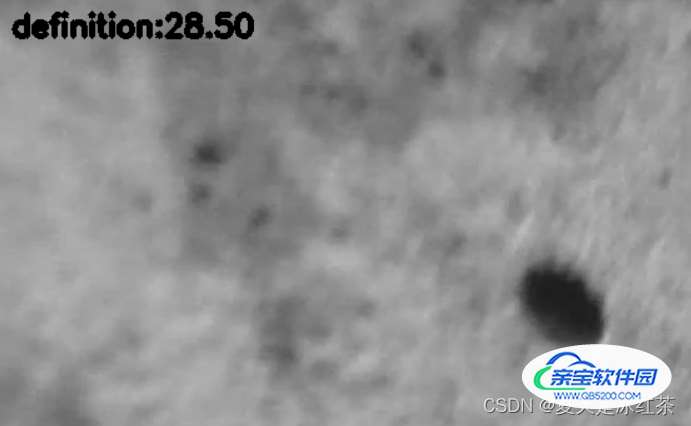
SWD2:
import cv2
import pyps.pyzjr.definition as din
import pyps.pyzjr.utility as ult
image=ult.read_resize_image("./compare/8881.jpg",space=True)
img = din.SMD2(image)
print(img)
cv2.putText(image, f"definition:{img:.2f}", (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 255), 3)
cv2.imshow("definition_Image", image)
cv2.waitKey(0)
Brenner:

Laplacian:
5、总结与评价
很遗憾,本次的清晰度评价失败了,如果想要得到一个边界值几乎不可能实现,哪怕通过大量图像数据(模糊图像与清晰图像)也不能完成,因为这些清晰度量化指标函数都是通过求图像像素的梯度,换汤不换药,在不同场景不同模糊的条件下很难去进行比对。
加载全部内容