React状态更新的优先级机制源码解析
goClient1992 人气:0为什么需要优先级
优先级机制最终目的是为了实现高优先级任务优先执行,低优先级任务延后执行。
实现这一目的的本质就是在低优先级任务执行时,有更高优先级任务进来的话,可以打断低优先级任务的执行。
同步模式下的react运行时
我们知道在同步模式下,从 setState 到 虚拟DOM遍历,再到真实DOM更新,整个过程都是同步执行且无法被中断的,这样可能就会出现一个问题 —— 用户事件触发的更新被阻塞。
什么是用户事件触发的更新被阻塞?如果 React 正在进行更新任务,此时用户触发了交互事件,且在事件回调中执行了 setState,在同步模式下,这个更新任务需要 等待 当前正在更新的任务完成之后,才会被执行。假如当前 React 正在进行的更新任务耗时比较久,用户事件触发的更新任务不能及时被执行,造成下个更新任务被阻塞,从而形成了卡顿。
这时候,我们就希望能够及时响应用户触发的事件,优先执行用户事件触发的更新任务,也就是我们说的异步模式
我们可以比较一下,同步模式下和异步模式(优先级机制)下更新任务执行的差异
import React from "react";
import "./styles.css";
export default class extends React.Component {
constructor() {
super();
this.state = {
list: new Array(10000).fill(1),
};
this.domRef = null;
}
componentDidMount() {
setTimeout(() => {
console.log("setTimeout 准备更新", performance.now());
this.setState(
{
list: new Array(10000).fill(Math.random() * 10000),
updateLanes: 16
},
() => {
console.log("setTimeout 更新完毕", performance.now());
}
);
}, 100);
setTimeout(() => {
this.domRef.click();
}, 150);
}
render() {
const { list } = this.state;
return (
<div
ref={(v) => (this.domRef = v)} className="App" onClick={() => { console.log("click 准备更新", performance.now()); this.setState( { list: new Array(10000).fill(2), updateLanes: 1 }, () => { console.log("click 更新完毕", performance.now()); } ); }} > {list.map((i, index) => ( <h2 key={i + +index}>Hello {i}</h2>
))} </div>
);
}
}
click事件 触发的更新,会比 setTimeout 触发的更新更优先执行,做到了及时响应用户事件,打断 setTimeout 更新任务(低优先级任务)的执行。
如何运用优先级机制优化react运行时
为了解决同步模式渲染下的缺陷,我们希望能够对 react 做出下面这些优化
- 确定不同场景下所触发更新的优先级,以便我们可以决定优先执行哪些任务
- 若有更高优先级的任务进来,我们需要打断当前进行的任务,然后执行这个高优先级任务
- 确保低优先级任务不会被一直打断,在一定时间后能够被升级为最高优先级的任务
确定不同场景下的调度优先级
看过 react 源码的小伙伴可能都会有一个疑惑,为什么源码里面有那么多优先级相关的单词??怎么区分他们呢?
其实在 react 中主要分为两类优先级,scheduler 优先级和 lane 优先级,lane优先级下面又派生出 event 优先级
- lane 优先级:主要用于任务调度前,对当前正在进行的任务和被调度任务做一个优先级校验,判断是否需要打断当前正在进行的任务
- event 优先级:本质上也是lane优先级,lane优先级是通用的,event优先级更多是结合浏览器原生事件,对lane优先级做了分类和映射
- scheduler 优先级:主要用在时间分片中任务过期时间的计算
lane优先级
可以用赛道的概念去理解lane优先级,lane优先级有31个,我们可以用31位的二进制值去表示,值的每一位代表一条赛道对应一个lane优先级,赛道位置越靠前,优先级越高
| 优先级 | 十进制值 | 二进制值 | 赛道位置 |
|---|---|---|---|
| NoLane | 0 | 0000000000000000000000000000000 | 0 |
| SyncLane | 1 | 0000000000000000000000000000001 | 0 |
| InputContinuousHydrationLane | 2 | 0000000000000000000000000000010 | 1 |
| InputContinuousLane | 4 | 0000000000000000000000000000100 | 2 |
| DefaultHydrationLane | 8 | 0000000000000000000000000001000 | 3 |
| DefaultLane | 16 | 0000000000000000000000000010000 | 4 |
| TransitionHydrationLane | 32 | 0000000000000000000000000100000 | 5 |
| TransitionLane1 | 64 | 0000000000000000000000001000000 | 6 |
| TransitionLane2 | 128 | 0000000000000000000000010000000 | 7 |
| TransitionLane3 | 256 | 0000000000000000000000100000000 | 8 |
| TransitionLane4 | 512 | 0000000000000000000001000000000 | 9 |
| TransitionLane5 | 1024 | 0000000000000000000010000000000 | 10 |
| TransitionLane | 2048 | 0000000000000000000100000000000 | 11 |
| TransitionLane7 | 4096 | 0000000000000000001000000000000 | 12 |
| TransitionLane8 | 8192 | 0000000000000000010000000000000 | 13 |
| TransitionLane9 | 16384 | 0000000000000000100000000000000 | 14 |
| TransitionLane10 | 32768 | 0000000000000001000000000000000 | 15 |
| TransitionLane11 | 65536 | 0000000000000010000000000000000 | 16 |
| TransitionLane12 | 131072 | 0000000000000100000000000000000 | 17 |
| TransitionLane13 | 262144 | 0000000000001000000000000000000 | 18 |
| TransitionLane14 | 524288 | 0000000000010000000000000000000 | 19 |
| TransitionLane15 | 1048576 | 0000000000100000000000000000000 | 20 |
| TransitionLane16 | 2097152 | 0000000001000000000000000000000 | 21 |
| RetryLane1 | 4194304 | 0000000010000000000000000000000 | 22 |
| RetryLane2 | 8388608 | 0000000100000000000000000000000 | 23 |
| RetryLane3 | 16777216 | 0000001000000000000000000000000 | 24 |
| RetryLane4 | 33554432 | 0000010000000000000000000000000 | 25 |
| RetryLane5 | 67108864 | 0000100000000000000000000000000 | 26 |
| SelectiveHydrationLane | 134217728 | 0001000000000000000000000000000 | 27 |
| IdleHydrationLane | 268435456 | 0010000000000000000000000000000 | 28 |
| IdleLane | 536870912 | 0100000000000000000000000000000 | 29 |
| OffscreenLane | 1073741824 | 1000000000000000000000000000000 | 30 |
event优先级
| EventPriority | Lane | 数值 | |
|---|---|---|---|
| DiscreteEventPriority | 离散事件。click、keydown、focusin等,事件的触发不是连续,可以做到快速响应 | SyncLane | 1 |
| ContinuousEventPriority | 连续事件。drag、scroll、mouseover等,事件的是连续触发的,快速响应可能会阻塞渲染,优先级较离散事件低 | InputContinuousLane | 4 |
| DefaultEventPriority | 默认的事件优先级 | DefaultLane | 16 |
| IdleEventPriority | 空闲的优先级 | IdleLane | 536870912 |
scheduler优先级
| SchedulerPriority | EventPriority | 大于>17.0.2 | 小于>17.0.2 |
|---|---|---|---|
| ImmediatePriority | DiscreteEventPriority | 1 | 99 |
| UserblockingPriority | Userblocking | 2 | 98 |
| NormalPriority | DefaultEventPriority | 3 | 97 |
| LowPriority | DefaultEventPriority | 4 | 96 |
| IdlePriority | IdleEventPriority | 5 | 95 |
| NoPriority | 0 | 90 |
优先级间的转换
lane优先级 转 event优先级(参考 lanesToEventPriority 函数)
- 转换规则:以区间的形式根据传入的lane返回对应的 event 优先级。比如传入的优先级不大于 Discrete 优先级,就返回 Discrete 优先级,以此类推
event优先级 转 scheduler优先级(参考 ensureRootIsScheduled 函数)
- 转换规则:可以参考上面scheduler优先级表
event优先级 转 lane优先级(参考 getEventPriority 函数)
- 转换规则:对于非离散、连续的事件,会根据一定规则作转换,具体课参考上面 event 优先级表,
优先级机制如何设计
说到优先级机制,我们可能马上能联想到的是优先级队列,其最突出的特性是最高优先级先出,react 的优先级机制跟优先级队列类似,不过其利用了赛道的概念,配合位与运算丰富了队列的功能,比起优先级队列,读写速度更快,更加容易理解
设计思路
- 合并赛道:维护一个队列,可以存储被占用的赛道
- 释放赛道:根据优先级释放对应被占用赛道
- 找出最高优先级赛道:获取队列中最高优先级赛道
- 快速定位赛道索引:根据优先级获取赛道在队列中所在的位置
- 判断赛道是否被占用:根据传入优先级判断该优先级所在赛道是否被占用
合并赛道
场景
- 比如当前正在调度的任务优先级是DefaultLane,用户点击触发更新,有一个高优先级的任务SyncLane产生,需要存储这个任务所占用的赛道
运算过程
- 运算方式:位或运算 -
a | b - 运算结果:DefaultLane和SyncLane分别占用了第1条和第5条赛道
DefaultLane优先级为16,SyncLane优先级为1
16 | 1 = 17
17的二进制值为10001
16的二进制值为10000,1的二进制值为00001
释放赛道
场景
- SyncLane 任务执行完,需要释放占用的赛道
运算过程
- 运算方式:位与+位非 -
a & ~b - 运算结果:SyncLane赛道被释放,只剩下DefaultLane赛道
17 & ~1 = 16
17的二进制值为10001为什么用位非?
~1 = -2
2 的二进制是00010,-2的话符号位取反变为10010
10001和10010进行位与运算得到10000,也就是十进制的16
找出最高优先级赛道
场景
- 当前有 DefaultLane 和 SyncLane 两个优先级的任务占用赛道,在进入 ensureRootIsScheduled 方法后,我需要先调度优先级最高的任务,所以需要找出当前优先级最高的赛道
运算过程
- 运算方式:位与+符号位取反 -
a & -b - 运算结果:找到了最高优先级的任务SyncLane,SyncLane任务为同步任务,Scheduler将以同步优先级调度当前应用根节点
17 & -17 = 1
17的二进制值为10001
-17的二进制值为00001
10001和00001进行位与运算得到1,也就是SyncLane
快速定位赛道索引
场景
- 饥饿任务唤醒:在发起调度前,我们需要对队列中的所有赛道进行一个判断,判断该赛道的任务是否过期,如果过期,就优先执行该过期任务。为此,需要维护一个长度为31的数组,数组的每个元素的下标索引与31个优先级赛道一一对应,数组中存储的是任务的过期时间,在判断时,我们希望能根据优先级快速找到该优先级在数组中对应的位置。
运算过程
- 运算方式:Math.clz32
- 运算结果:找到了DefaultLane的索引位置为4,那就可以释放应用根节点上的eventTimes、expirationTimes,将其所在位置的值赋值为-1,然后执行对应的过期任务
// 找出 DefaultLane 赛道索引
31 - Math.clz32(16) = 416的二进制值为10000
索引4对应的就是第五个赛道
Math.clz32是用来干什么的?
- 获取一个十进制数字对应二进制值中开头0的个数。
- 所以用31减去
Math.clz32的值就能得到该赛道的索引
判断赛道是否被占用
异步模式下会存在高优先级任务插队的情况,此情况下 state 的计算方式会跟同步模式下**有些不同。
场景
我们 setState 之后并不是马上就会更新 state,而是会根据 setState 的内容生成一个 Update 对象,这个对象包含了更新内容、更新优先级等属性。
更新 state 这个动作是在 processUpdateQueue 函数里进行的,函数里面会判断 Update 对象的优先级所在赛道是否被占用,来决定是否在此轮任务中计算这个 Update 对象的 state
- 如果被占用,代表
Update对象优先级和当前正在进行的任务相等,可以根据Update对象计算state并更新到 Fiber 节点的memoizedState属性上 - 如果未被占用,代表当前正在进行的任务优先级比这个
Update对象优先级高,相应的这个低优先级的Update对象将暂不被计算state,留到下一轮低优先级任务被重启时再进行计算
运算过程
- 运算方式:位与
(renderLanes & updateLanes) == updateLanes - 运算结果:0代表当前调度优先级高于某个Update对象优先级
运算公式
(1 & 16) == 161的二进制值为00001
16的二进制值为10000
00001和10000进行位与运算得到0
如何将优先级机制融入React运行时
生成一个更新任务
生成任务的流程其实非常简单,入口就在我们常用的 setState 函数,先上图
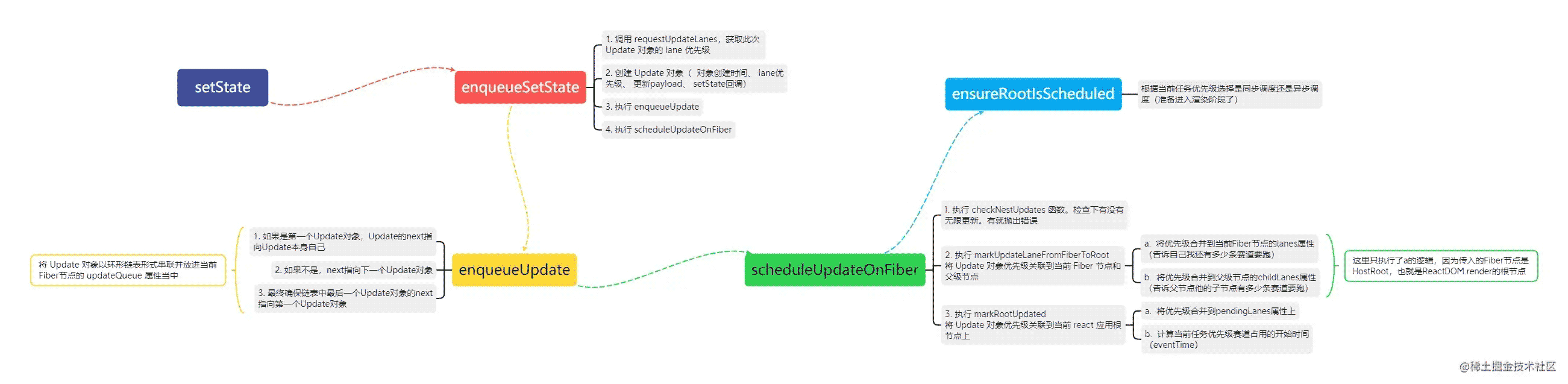
setState 函数内部执行的就是 enqueueUpdate 函数,而 enqueueUpdate 函数的工作主要分为4步:
- 获取本次更新的优先级。
- 创建
Update对象 - 将本次更新优先级关联到当前Fiber节点、父级节点和应用根节点
- 发起
ensureRootIsScheduled调度。
步骤一:获取本次更新的优先级
步骤一的工作是调用 requestUpdateLane 函数拿到此次更新任务的优先级
如果当前为非 concurrent 模式
- 当前不在 render 阶段。返回 syncLane
- 当前正在 render 阶段。返回 workInProgressRootRenderLanes 中最高的优先级(这里就用到上面的优先级运算机制,找出最高优先级赛道)
如果当前为 concurrent 模式
- 需要执行延迟任务的话,比如
Suspend、useTransition、useDefferedValue等特性。在transition类型的优先级中寻找空闲的赛道。transition类型的赛道有 16 条,从第 1 条到第 16 条,当到达第 16 条赛道后,下一次transition类型的任务会回到第 1 条赛道,如此往复。 - 执行
getCurrentUpdatePriority函数。获取当前更新优先级。如果不为NoLane就返回 - 执行
getCurrentEventPriority函数。返回当前的事件优先级。如果没有事件产生,返回DefaultEventPriority
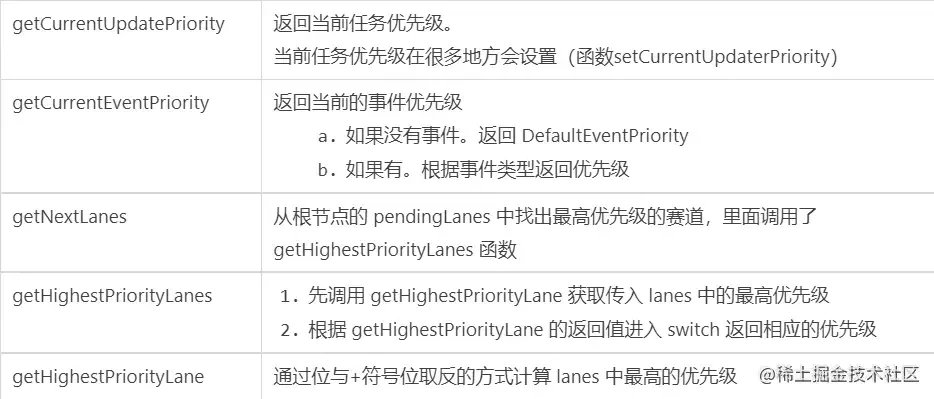
总的来说,requestUpdateLane 函数的优先级选取判断顺序如下:
SyncLane >> TransitionLane >> UpdateLane >> EventLane
估计有很多小伙伴都会很困惑一个问题,为什么会有这么多获取优先级的函数,这里我整理了一下其他函数的职责
步骤二:创建 Update 对象
这里的代码量不多,其实就是将 setState 的参数用一个对象封装起来,留给 render 阶段用
function createUpdate(eventTime, lane) {
var update = {
eventTime: eventTime,
lane: lane,
tag: UpdateState,
payload: null,
callback: null,
next: null
};
return update;
}
步骤三:关联优先级
在这里先解释两个概念,一个是 HostRoot,一个是 FiberRootNode
HostRoot:就是ReactDOM.render的第一个参数,组件树的根节点。HostRoot可能会存在多个,因为ReactDOM.render可以多次调用FiberRootNode:react 的应用根节点,每个页面只有一个 react 的应用根节点。可以从HostRoot节点的stateNode属性访问
这里关联优先级主要执行了两个函数
markUpdateLaneFromFiberToRoot。该函数主要做了两个事情
- 将优先级合并到当前 Fiber 节点的 lanes 属性中
- 将优先级合并到父级节点的 childLanes 属性中(告诉父节点他的子节点有多少条赛道要跑) 但因为函数传入的 Fiber 节点是
HostRoot,也就是ReactDOM.render的根节点,也就是说没有父节点了,所以第二件事情没有做
markRootUpdated。该函数也是主要做了两个事情
- 将待调度任务优先级合并到当前 react 应用根节点上
- 计算当前任务优先级赛道占用的开始时间(eventTime)
由此可见,react 的优先级机制并不独立运行在每一个组件节点里面,而是依赖一个全局的 react 应用根节点去控制下面多个组件树的任务调度
将优先级关联到这些Fiber节点有什么用?
先说说他们的区别
- lanes:只存在非 react 应用根节点上,记录当前 Fiber 节点的 lane 优先级
- childLanes:只存在非 react 应用根节点上,记录当前 Fiber 节点下的所有子 Fiber 节点的 lane 优先级
- pendingLanes:只存在 react 应用根节点上,记录的是所有
HostRoot的 lane 优先级
具体应用场景
- 释放赛道。上面说的优先级运算机制提到了任务执行完毕会释放赛道,具体来说是在 commit 阶段结束之后释放被占用的优先级,也就是
markRootFinished函数。 - 判断赛道是否被占用。在 render 阶段的
beginWork流程里面,会有很多判断childLanes是否被占用的判断
步骤四:发起调度
调度里面最关键的一步,就是 ensureRootIsScheduled 函数的调用,该函数的逻辑就是由下面两大部分构成,高优先级任务打断低优先级任务 和 饥饿任务问题
高优先级任务打断低优先级任务
该部分流程可以分为三部曲
- cancelCallback
- pop(taskQueue)
- 低优先级任务重启
cancelCallback
var existingCallbackNode = root.callbackNode;
var existingCallbackPriority = root.callbackPriority;
var newCallbackPriority = getHighestPriorityLane(nextLanes);
if (existingCallbackPriority === newCallbackPriority) {
...
return;
}
if (existingCallbackNode != null) {
cancelCallback(existingCallbackNode);
}
newCallbackNode = scheduleCallback(
schedulerPriorityLevel,
performConcurrentWorkOnRoot.bind(null, root)
);
root.callbackPriority = newCallbackPriority;
root.callbackNode = newCallbackNode;
上面是 ensureRootIsScheduled 函数的一些代码片段,先对变量做解释
existingCallbackNode:当前 render 阶段正在进行的任务
existingCallbackPriority:当前 render 阶段正在进行的任务优先级
newCallbackPriority:此次调度优先级
这里会判断 existingCallbackPriority 和 newCallbackPriority 两个优先级是否相等,如果相等,此次更新合并到当前正在进行的任务中。如果不相等,代表此次更新任务的优先级更高,需要打断当前正在进行的任务
如何打断任务?
- 关键函数
cancelCallback(existingCallbackNode),cancelCallback函数就是将root.callbackNode赋值为null performConcurrentWorkOnRoot函数会先把root.callbackNode缓存起来,在函数末尾会再判断root.callbackNode和开始缓存起来的值是否一样,如果不一样,就代表root.callbackNode被赋值为null了,有更高优先级任务进来。- 此时
performConcurrentWorkOnRoot返回值为null
下面是 performConcurrentWorkOnRoot 代码片段
...
var originalCallbackNode = root.callbackNode;
...
// 函数末尾
if (root.callbackNode === originalCallbackNode) {
return performConcurrentWorkOnRoot.bind(null, root);
}
return null;
由上面 ensureRootIsScheduled 的代码片段可以知道,performConcurrentWorkOnRoot 函数是被 scheduleCallback 函数调度的,具体返回后的逻辑需要到 Scheduler 模块去找
pop(taskQueue)
var callback = currentTask.callback;
if (typeof callback === 'function') {
...
} else {
pop(taskQueue);
}
上面是 Scheduler 模块里面 workLoop 函数的代码片段,currentTask.callback 就是 scheduleCallback 的第二个参数,也就是performConcurrentWorkOnRoot 函数
承接上个主题,如果 performConcurrentWorkOnRoot 函数返回了null,workLoop 内部就会执行 pop(taskQueue),将当前的任务从 taskQueue 中弹出。
低优先级任务重启
上一步中说道一个低优先级任务从 taskQueue 中被弹出。那高优先级任务执行完毕之后,如何重启回之前的低优先级任务呢?
关键是在 commitRootImpl 函数
var remainingLanes = mergeLanes(finishedWork.lanes, finishedWork.childLanes); markRootFinished(root, remainingLanes); ... ensureRootIsScheduled(root, now());
markRootFinished 函数刚刚上面说了是释放已完成任务所占用的赛道,那也就是说未完成任务依然会占用其赛道,所以我们可以重新调用 ensureRootIsScheduled 发起一次新的调度,去重启低优先级任务的执行。我们可以看下重启部分的判断
var nextLanes = getNextLanes(
root, root === workInProgressRoot ? workInProgressRootRenderLanes : NoLanes
);
// 如果 nextLanes 为 NoLanes,就证明所有任务都执行完毕了
if (nextLanes === NoLanes) {
...
root.callbackNode = null;
root.callbackPriority = NoLane;
// 只要 nextLanes 为 NoLanes,就可以结束调度了
return;
}
// 如果 nextLanes 不为 NoLanes,就代表还有任务未执行完,也就是那些被打断的低优先级任务
...
饥饿任务问题
上面说到,在高优先级任务执行完毕之后,低优先级任务就会被重启,但假设如果持续有高优先级任务持续进来,我的低优先级任务岂不是没有重启之日?
所以 react 为了处理解决饥饿任务问题,react 在 ensureRootIsScheduled 函数开始的时候做了以下处理:(参考markStarvedLanesAsExpired函数)
var lanes = pendingLanes;
while (lanes > 0) {
var index = pickArbitraryLaneIndex(lanes);
var lane = 1 << index;
var expirationTime = expirationTimes[index];
if (expirationTime === NoTimestamp) {
if ((lane & suspendedLanes) === NoLanes || (lane & pingedLanes) !== NoLanes) {
expirationTimes[index] = computeExpirationTime(lane, currentTime);
}
} else if (expirationTime <= currentTime) {
root.expiredLanes |= lane;
}
lanes &= ~lane;
}
- 遍历31条赛道,判断每条赛道的过期时间是否为
NoTimestamp,如果是,且该赛道存在待执行的任务,则为该赛道初始化过期时间 - 如果该赛道已存在过期时间,且过期时间已经小于当前时间,则代表任务已过期,需要将当前优先级合并到
expiredLanes,这样在下一轮 render 阶段就会以同步优先级调度当前HostRoot
可以参考 render 阶段执行的函数 performConcurrentWorkOnRoot 中的代码片段
var exitStatus = shouldTimeSlice(root, lanes) && ( !didTimeout) ?
renderRootConcurrent(root, lanes) :
renderRootSync(root, lanes);
可以看到只要 shouldTimeSlice 只要返回 false,就会执行 renderRootSync,也就是以同步优先级进入 render 阶段。而 shouldTimeSlice 的逻辑也就是刚刚的 expiredLanes 属性相关
function shouldTimeSlice(root, lanes) {
// 如果 expiredLanes 里面有东西,代表有饥饿任务
if ((lanes & root.expiredLanes) !== NoLanes) {
return false;
}
var SyncDefaultLanes = InputContinuousHydrationLane |
InputContinuousLane |
DefaultHydrationLane |
DefaultLane;
return (lanes & SyncDefaultLanes) === NoLanes;
}
总结
react 的优先级机制在源码中并不是一个独立的,解耦的模块,而是涉及到了react整体运行的方方面面,最后回归整理下优先级机制在源码中的使用,让大家对优先级机制有一个更加整体的认知。
- 时间分片。涉及到任务打断、根据优先级计算分片时长
- setState 生成 Update 对象。每个 Update 对象里面都有一个 lane 属性,代表此次更新的优先级
- 高优先级任务打断低优先级任务。每一次调度都会对正在进行任务和当前任务最高优先级做比较,如果不相等,就代表有高优先级任务进来,需要打断当前正在的任务。
- 低优先级任务重启。协调
(reconcile)的下一个阶段是渲染(renderer),也就是我们说的 commit 阶段,在此阶段末尾,会调用ensureRootIsScheduled发起一次新的调度,执行尚未完成的低优先级任务。 - 饥饿任务唤醒。每次调度的开始,都会先检查下有没有过期任务,如果有的话,下一次就会以同步优先级进行 render 任务
(reconcile),同步优先级就是最高的优先级,不会被打断
加载全部内容