Python图像手绘
夏天是冰红茶 人气:0图像的数组表示
图像的RGB色彩模式

图像一般使用RGB色彩模式,即每个像素点的颜色由红(R)、绿(G)、蓝(B)组成。
RGB三个颜色通道的变化和叠加得到各种颜色,其中
- R 红色,取值范围,0‐255
- G 绿色,取值范围,0‐255
- B 蓝色,取值范围,0‐255
RGB形成的颜色包括了人类视力所能感知的所有颜色。
PIL库
PIL——Python Image Library
PIL库是一个具有强大图像处理能力的第三方库 在命令行下的安装方法:
#安装 pip install pillow #引入包 from PIL import Image
Image是PIL库中代表一个图像的类(对象)。
图像组成
图像是一个由像素组成的二维矩阵,每个元素是一个RGB值,它是(R,G,B)。图像是一个三维数组,维度分别是高度、宽度和像素RGB值。
from PIL import Image
import numpy as np
im=np.array(Image.open("beijing.jpg"))
print(im.shape,im.dtype)它的输出是
(669, 1012, 3) uint8
图像的变换
我们将会完成在读入图像后,获得像素RGB值,修改后保存为新的文件。

让我们先来看看对每个像素形成互补的图像:
from PIL import Image
import numpy as np
a=np.array(Image.open("beijing.jpg"))
b=[255,255,255]-a
im=Image.fromarray(b.astype("uint8"))
im.save('./new.jpg')
再来看看图像进行灰度处理后,剩下两个通道。
from PIL import Image
import numpy as np
a=np.array(Image.open("beijing.jpg").convert("L"))
b=255-a
im=Image.fromarray(b.astype("uint8"))
im.save('./new.jpg')
灰度图像后的区间变换
from PIL import Image
import numpy as np
a=np.array(Image.open("beijing.jpg").convert("L"))
b=(100/255)*a+150
im=Image.fromarray(b.astype("uint8"))
im.save('./new.jpg')
灰度图像后的像素平方
from PIL import Image
import numpy as np
a=np.array(Image.open("beijing.jpg").convert("L"))
b=255*(a/255)**2
im=Image.fromarray(b.astype("uint8"))
im.save('./new.jpg')
那大家也看到了,我们只需要对其b进行修改即可。
图像的手绘效果
手绘效果展示
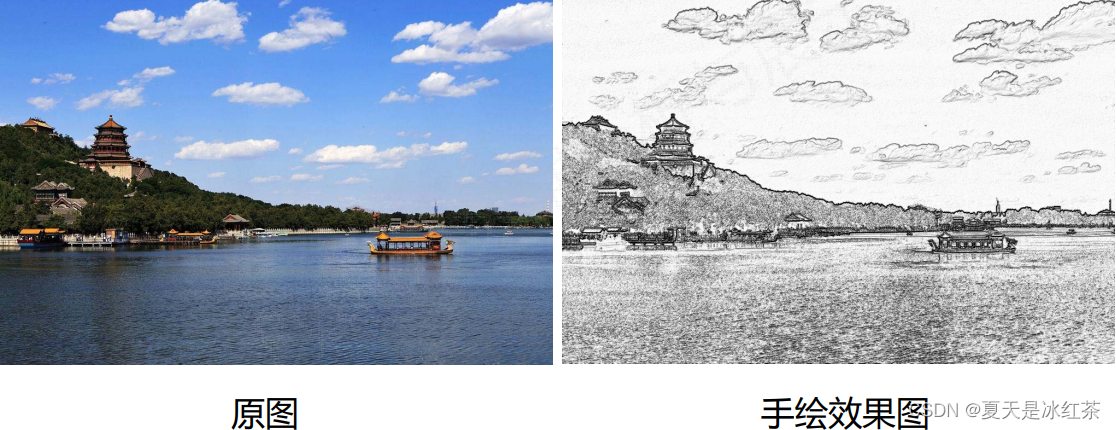
手绘效果的几个特征:
- 黑白灰色
- 边界线条较重
- 相同或相近色彩趋于白色
- 略有光源效果
代码展示与讲解
from PIL import Image
import numpy as np
a = np.asarray(Image.open('./beijing.jpg').convert('L')).astype('float')
depth = 10. # (0-100)
grad = np.gradient(a) #取图像灰度的梯度值
grad_x, grad_y = grad #分别取横纵图像梯度值
grad_x = grad_x*depth/100.
grad_y = grad_y*depth/100.
A = np.sqrt(grad_x**2 + grad_y**2 + 1.)
uni_x = grad_x/A
uni_y = grad_y/A
uni_z = 1./A
vec_el = np.pi/2.2 # 光源的俯视角度,弧度值
vec_az = np.pi/4. # 光源的方位角度,弧度值
dx = np.cos(vec_el)*np.cos(vec_az) #光源对x 轴的影响
dy = np.cos(vec_el)*np.sin(vec_az) #光源对y 轴的影响
dz = np.sin(vec_el) #光源对z 轴的影响
b = 255*(dx*uni_x + dy*uni_y + dz*uni_z) #光源归一化
b = b.clip(0,255)
im = Image.fromarray(b.astype('uint8')) #重构图像
im.save('./beijingHD.jpg')
梯度的重构
利用像素之间的梯度值和虚拟深度值对图像进行重构,根据灰度变化来模拟人类视觉的远近程度。
depth = 10. grad = np.gradient(a) grad_x, grad_y = grad grad_x = grad_x*depth/100. grad_y = grad_y*depth/100.
depth预设深度值为10,其取值范围0‐100,再提取x和y方向的梯度值,根据深度调整x和y方向的梯度值。
光源效果
根据灰度变化来模拟人类视觉的远近程度。
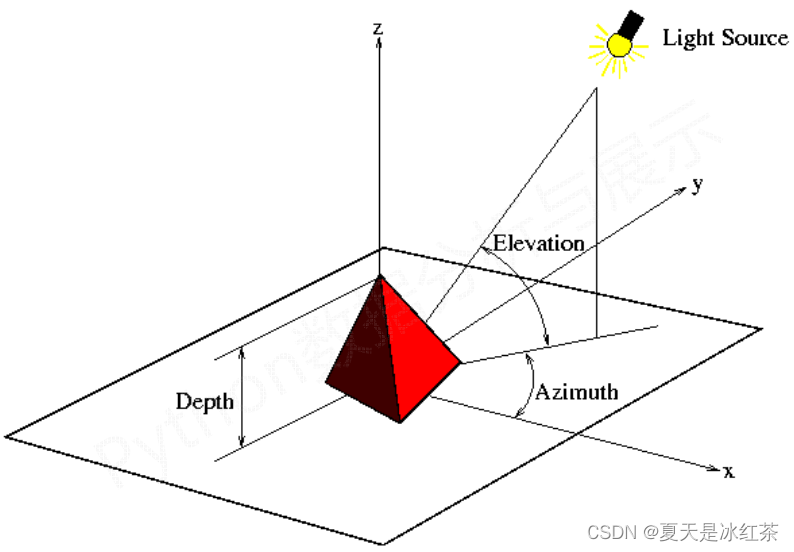
- 设计一个位于图像斜上方的虚拟光源
- 光源相对于图像的俯视角为Elevation,方位角为Azimuth
- 建立光源对个点梯度值的影响函数
- 运算出各点的新像素值
vec_el = np.pi/2.2 vec_az = np.pi/4. dx = np.cos(vec_el)*np.cos(vec_az) dy = np.cos(vec_el)*np.sin(vec_az) dz = np.sin(vec_el)
np.cos(vec_el)为单位光线在地平面上的投影长度,dx, dy, dz是光源对x/y/z三方向的影响程度。
梯度归一化
A = np.sqrt(grad_x**2 + grad_y**2 + 1.) uni_x = grad_x/A uni_y = grad_y/A uni_z = 1./A b = 255*(dx*uni_x + dy*uni_y + dz*uni_z)
A是构造x和y轴梯度的三维归一化单位坐标系,然后梯度与光源相互作用,将梯度转化为灰度
图像生成
b = b.clip(0,255)
im = Image.fromarray(b.astype('uint8')) #重构图像
im.save('./beijingHD.jpg')在这里,为避免数据越界,将生成的灰度值裁剪至0‐255区间
加载全部内容