自学围棋的AlphaGo Zero,你也可以造一个
人气:0- 01
遥想当年,AlphaGo的Master版本,在完胜柯洁九段之后不久,就被后辈AlphaGo Zero (简称狗零) 击溃了。

从一只完全不懂围棋的AI,到打败Master,狗零只用了21天。
而且,它不需要用人类知识来喂养,成为顶尖棋手全靠自学。

如果能培育这样一只AI,即便自己不会下棋,也可以很骄傲吧。
于是,来自巴黎的少年Dylan Djian (简称小笛) ,就照着狗零的论文去实现了一下。

他给自己的AI棋手起名SuperGo,也提供了代码 (传送门见文底) 。
除此之外,还有教程——
一个身子两个头
智能体分成三个部分:
一是特征提取器 (Feature Extractor) ,二是策略网络 (Policy Network) ,三是价值网络(Value Network) 。
于是,狗零也被亲切地称为“双头怪”。特征提取器是身子,其他两个网络是脑子。
特征提取器
特征提取模型,是个残差网络 (ResNet) ,就是给普通CNN加上了跳层连接 (Skip Connection) , 让梯度的传播更加通畅。
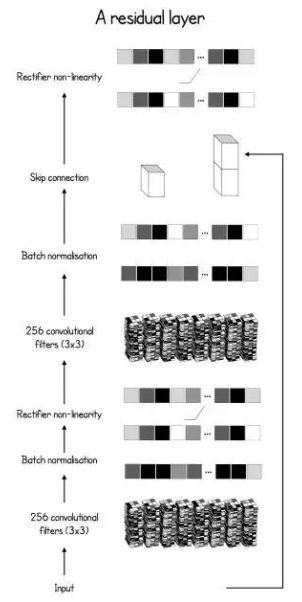
跳跃的样子,写成代码就是:
1class BasicBlock(nn.Module):
2 """
3 Basic residual block with 2 convolutions and a skip connection
4 before the last ReLU activation.
5 """
6
7 def __init__(self, inplanes, planes, stride=1, downsample=None):
8 super(BasicBlock, self).__init__()
9
10 self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=3,
11 stride=stride, padding=1, bias=False)
12 self.bn1 = nn.BatchNorm2d(planes)
13
14 self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
15 stride=stride, padding=1, bias=False)
16 self.bn2 = nn.BatchNorm2d(planes)
17
18
19 def forward(self, x):
20 residual = x
21
22 out = self.conv1(x)
23 out = F.relu(self.bn1(out))
24
25 out = self.conv2(out)
26 out = self.bn2(out)
27
28 out += residual
29 out = F.relu(out)
30
31 return out
然后,把它加到特征提取模型里面去:
1class Extractor(nn.Module):
2 def __init__(self, inplanes, outplanes):
3 super(Extractor, self).__init__()
4 self.conv1 = nn.Conv2d(inplanes, outplanes, stride=1,
5 kernel_size=3, padding=1, bias=False)
6 self.bn1 = nn.BatchNorm2d(outplanes)
7
8 for block in range(BLOCKS):
9 setattr(self, "res{}".format(block), \
10 BasicBlock(outplanes, outplanes))
11
12
13 def forward(self, x):
14 x = F.relu(self.bn1(self.conv1(x)))
15 for block in range(BLOCKS - 1):
16 x = getattr(self, "res{}".format(block))(x)
17
18 feature_maps = getattr(self, "res{}".format(BLOCKS - 1))(x)
19 return feature_maps
策略网络
策略网络就是普通的CNN了,里面有个批量标准化 (Batch Normalization) ,还有一个全连接层,输出概率分布。

1class PolicyNet(nn.Module):
2 def __init__(self, inplanes, outplanes):
3 super(PolicyNet, self).__init__()
4 self.outplanes = outplanes
5 self.conv = nn.Conv2d(inplanes, 1, kernel_size=1)
6 self.bn = nn.BatchNorm2d(1)
7 self.logsoftmax = nn.LogSoftmax(dim=1)
8 self.fc = nn.Linear(outplanes - 1, outplanes)
9
10
11 def forward(self, x):
12 x = F.relu(self.bn(self.conv(x)))
13 x = x.view(-1, self.outplanes - 1)
14 x = self.fc(x)
15 probas = self.logsoftmax(x).exp()
16
17 return probas
价值网络
这个网络稍微复杂一点。除了标配之外,还要再多加一个全连接层。最后,用双曲正切 (Hyperbolic Tangent) 算出 (-1,1) 之间的数值,来表示当前状态下的赢面多大。
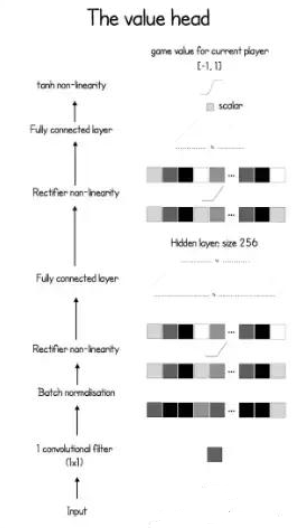
代码长这样——
1class ValueNet(nn.Module):
2 def __init__(self, inplanes, outplanes):
3 super(ValueNet, self).__init__()
4 self.outplanes = outplanes
5 self.conv = nn.Conv2d(inplanes, 1, kernel_size=1)
6 self.bn = nn.BatchNorm2d(1)
7 self.fc1 = nn.Linear(outplanes - 1, 256)
8 self.fc2 = nn.Linear(256, 1)
9
10
11 def forward(self, x):
12 x = F.relu(self.bn(self.conv(x)))
13 x = x.view(-1, self.outplanes - 1)
14 x = F.relu(self.fc1(x))
15 winning = F.tanh(self.fc2(x))
16 return winning
未雨绸缪的树
狗零,还有一个很重要的组成部分,就是蒙特卡洛树搜索 (MCTS) 。
它可以让AI棋手提前找出,胜率最高的落子点。
在模拟器里,模拟对方的下一手,以及再下一手,给出应对之策,所以提前的远不止是一步。
节点 (Node)
树上的每一个节点,都代表一种不同的局势,有不同的统计数据:
每个节点被经过的次数n,总动作值w,经过这一点的先验概率p,平均动作值q (q=w/n) ,还有从别处来到这个节点走的那一步,以及从这个节点出发、所有可能的下一步。
1class Node:
2 def __init__(self, parent=None, proba=None, move=None):
3 self.p = proba
4 self.n = 0
5 self.w = 0
6 self.q = 0
7 self.children = []
8 self.parent = parent
9 self.move = move
部署 (Rollout)
第一步是PUCT (多项式上置信树) 算法,选择能让PUCT函数 (下图) 的某个变体 (Variant) 最大化,的走法。

写成代码的话——
1def select(nodes, c_puct=C_PUCT):
2 " Optimized version of the selection based of the PUCT formula "
3
4 total_count = 0
5 for i in range(nodes.shape[0]):
6 total_count += nodes[i][1]
7
8 action_scores = np.zeros(nodes.shape[0])
9 for i in range(nodes.shape[0]):
10 action_scores[i] = nodes[i][0] + c_puct * nodes[i][2] * \
11 (np.sqrt(total_count) / (1 + nodes[i][1]))
12
13 equals = np.where(action_scores == np.max(action_scores))[0]
14 if equals.shape[0] > 0:
15 return np.random.choice(equals)
16 return equals[0]
结束 (Ending)
选择在不停地进行,直至到达一个叶节点 (Leaf Node) ,而这个节点还没有往下生枝。
1def is_leaf(self):
2 """ Check whether a node is a leaf or not """
3
4 return len(self.children) == 0
到了叶节点,那里的一个随机状态就会被评估,得出所有“下一步”的概率。
所有被禁的落子点,概率会变成零,然后重新把总概率归为1。
然后,这个叶节点就会生出枝节 (都是可以落子的位置,概率不为零的那些) 。代码如下——
1def expand(self, probas):
2 self.children = [Node(parent=self, move=idx, proba=probas[idx]) \
3 for idx in range(probas.shape[0]) if probas[idx] > 0]
更新一下
枝节生好之后,这个叶节点和它的妈妈们,身上的统计数据都会更新,用的是下面这两串代码。
1def update(self, v):
2 """ Update the node statistics after a rollout """
3
4 self.w = self.w + v
5 self.q = self.w / self.n if self.n > 0 else 0
1while current_node.parent:
2 current_node.update(v)
3 current_node = current_node.parent
选择落子点
模拟器搭好了,每个可能的“下一步”,都有了自己的统计数据。
按照这些数据,算法会选择其中一步,真要落子的地方。
选择有两种,一就是选择被模拟的次数最多的点。试用于测试和实战。
另外一种,随机 (Stochastically) 选择,把节点被经过的次数转换成概率分布,用的是以下代码——
1 total = np.sum(action_scores)
2 probas = action_scores / total
3 move = np.random.choice(action_scores.shape[0], p=probas)
后者适用于训练,让AlphaGo探索更多可能的选择。
三位一体的修炼
狗零的修炼分为三个过程,是异步的。
一是自对弈 (Self-Play) ,用来生成数据。
1def self_play():
2 while True:
3 new_player, checkpoint = load_player()
4 if new_player:
5 player = new_player
6
7 ## Create the self-play match queue of processes
8 results = create_matches(player, cores=PARALLEL_SELF_PLAY,
9 match_number=SELF_PLAY_MATCH)
10 for _ in range(SELF_PLAY_MATCH):
11 result = results.get()
12 db.insert({
13 "game": result,
14 "id": game_id
15 })
16 game_id += 1
二是训练 (Training) ,拿新鲜生成的数据,来改进当前的神经网络。
1def train():
2 criterion = AlphaLoss()
3 dataset = SelfPlayDataset()
4 player, checkpoint = load_player(current_time, loaded_version)
5 optimizer = create_optimizer(player, lr,
6 param=checkpoint['optimizer'])
7 best_player = deepcopy(player)
8 dataloader = DataLoader(dataset, collate_fn=collate_fn, \
9 batch_size=BATCH_SIZE, shuffle=True)
10
11 while True:
12 for batch_idx, (state, move, winner) in enumerate(dataloader):
13
14 ## Evaluate a copy of the current network
15 if total_ite % TRAIN_STEPS == 0:
16 pending_player = deepcopy(player)
17 result = evaluate(pending_player, best_player)
18
19 if result:
20 best_player = pending_player
21
22 example = {
23 'state': state,
24 'winner': winner,
25 'move' : move
26 }
27 optimizer.zero_grad()
28 winner, probas = pending_player.predict(example['state'])
29
30 loss = criterion(winner, example['winner'], \
31 probas, example['move'])
32 loss.backward()
33 optimizer.step()
34
35 ## Fetch new games
36 if total_ite % REFRESH_TICK == 0:
37 last_id = fetch_new_games(collection, dataset, last_id)
训练用的损失函数表示如下:
1class AlphaLoss(torch.nn.Module):
2 def __init__(self):
3 super(AlphaLoss, self).__init__()
4
5 def forward(self, pred_winner, winner, pred_probas, probas):
6 value_error = (winner - pred_winner) ** 2
7 policy_error = torch.sum((-probas *
8 (1e-6 + pred_probas).log()), 1)
9 total_error = (value_error.view(-1) + policy_error).mean()
10 return total_error
三是评估 (Evaluation) ,看训练过的智能体,比起正在生成数据的智能体,是不是更优秀了 (最优秀者回到第一步,继续生成数据) 。
1def evaluate(player, new_player):
2 results = play(player, opponent=new_player)
3 black_wins = 0
4 white_wins = 0
5
6 for result in results:
7 if result[0] == 1:
8 white_wins += 1
9 elif result[0] == 0:
10 black_wins += 1
11
12 ## Check if the trained player (black) is better than
13 ## the current best player depending on the threshold
14 if black_wins >= EVAL_THRESH * len(results):
15 return True
16 return False
第三部分很重要,要不断选出最优的网络,来不断生成高质量的数据,才能提升AI的棋艺。
三个环节周而复始,才能养成强大的棋手。
有志于AI围棋的各位,也可以试一试这个PyTorch实现。
本来摘自量子位,原作 Dylan Djian。
代码实现传送门:
网页链接
教程原文传送门:
网页链接
AlphaGo Zero论文传送门:
网页链接
加载全部内容