Python SIFT尺度图像特征变换
今年的浙江省状元 人气:0图像特征-SIFT尺度不变特征变换
1.1图像尺度空间
在一定的范围内,无论物体是大还是小,人眼都可以分辨出来,然后计算机要具有相同的能力却很难,所以要让机器能够对物体在不同尺度下有一个统一的认知,就需要考虑图像在不同尺度下都存在的特点。
尺度空间的获取通常使用高斯模糊来实现

1.2多分辨率金字塔

1.3高斯差分金字塔

1.4DoG空间极值检测
为了寻找尺度空间的极值点,每个像素点要和其图像域(同一尺度空间)和尺度域(相邻的尺度空间)的所有相邻点进行比较,当其大于(或者小于)所有相邻点时,该点就是极值点。如下图所示,中间的检测点要和其所在图像的33邻域8个像素点,以及其相邻的上下两层33邻域18个像素点,共26个像素点进行比较。

1.5关键点的精确定位
这些候选关键点是DoG空间的局部极值点,而且这些极值点均为离散的点,精确定位极值点的一种方法是对尺度空间DoG函数进行曲线拟合,计算其极值点,从而实现关键点的精确定位。

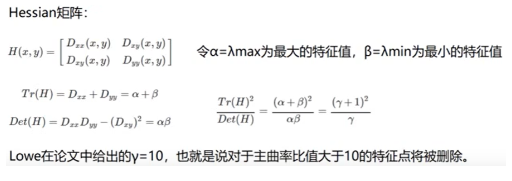
1.6消除边界响应
1.7特征点的主方向

1.8生成特征描述



OpenCV SIFT函数
import cv2 #opencv 读取进来为BGR格式
import matplotlib.pyplot as plt
import numpy as np
#一个魔法指令,不需要采用plt.show()显示图像
%matplotlib inline
print(cv2.__version__) # 3.4.1.15 pip install opencv-python ==3.4.1.15 pip install opencv-contrib-python==3.4.1.15
def cv_show(name,img):
cv2.imshow(name,img)
cv2.waitKey(0)
cv2.destroyAllWindows()
img = cv2.imread('images/test2.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv_show('gray',gray)
#得到特征点
sift = cv2.xfeatures2d.SIFT_create()
kp = sift.detect(gray,None)
img = cv2.drawKeypoints(gray,kp,img)
cv_show('keyPoint',img)
# 计算特征
kp, des = sift.compute(gray, kp)
print(np.array(kp).shape)
print(des.shape)
print(des[0])
加载全部内容