OpenCV图像几何变换
侯小啾 人气:0准备图片
选择一张shape为(500,500,3)的梵高的《星月夜》以便示例。

1. 缩放 cv2.resize()方法
cv2.resize(src, dsize, dst=None, fx=None, fy=None, interpolation=None)
src 原图(的数组)
dsize: 输出图像的大小 格式:(a,b)。
设定dsize后就无需再设置fx和fy
fx 可选参数 水平方向缩放比
fy 可选参数 垂直方向缩放比
fx和fy不同于dsize,fx和fy是各是一个比值,如设为2,则表示放大2倍,设为1/2则表示缩小到原来的1/2
import cv2
img = cv2.imread("The_Starry_Night.jpg")
dst1 = cv2.resize(img, (200, 200))
dst2 = cv2.resize(img, (900, 900))
cv2.imshow("img", img)
cv2.imshow("dst1", dst1)
cv2.imshow("dst2", dst2)
cv2.waitKey()
cv2.destroyAllWindows()执行结果如图所示,相比原图,图像得到了指定大小的缩小与放大。

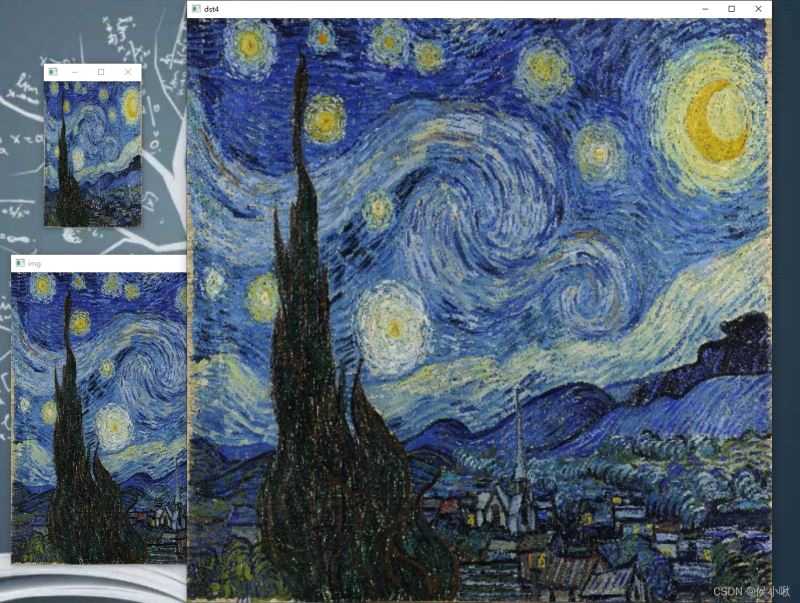
使用fx和fy参数,则需要手动把dsize设为None。
import cv2
img = cv2.imread("The_Starry_Night.jpg")
# 将宽缩小到原来的1/3、高缩小到原来的1/2
dst3 = cv2.resize(img, None, fx=1 / 3, fy=1 / 2)
# 将宽高扩大2倍
dst4 = cv2.resize(img, None, fx=2, fy=2)
cv2.imshow("img", img)
cv2.imshow("dst3", dst3)
cv2.imshow("dst4", dst4)
cv2.waitKey()
cv2.destroyAllWindows()
结果呈现:
2. 翻转 cv2.flip()方法
flip(src, flipCode, dst=None)
src 图像(数组)
flipCode 翻转代码。可以是0,正数,负数。0表示沿X轴(水平方向的轴)翻转。1表示沿Y轴(竖直方向的轴)翻转。
负数表示同时沿X轴和Y轴翻转。
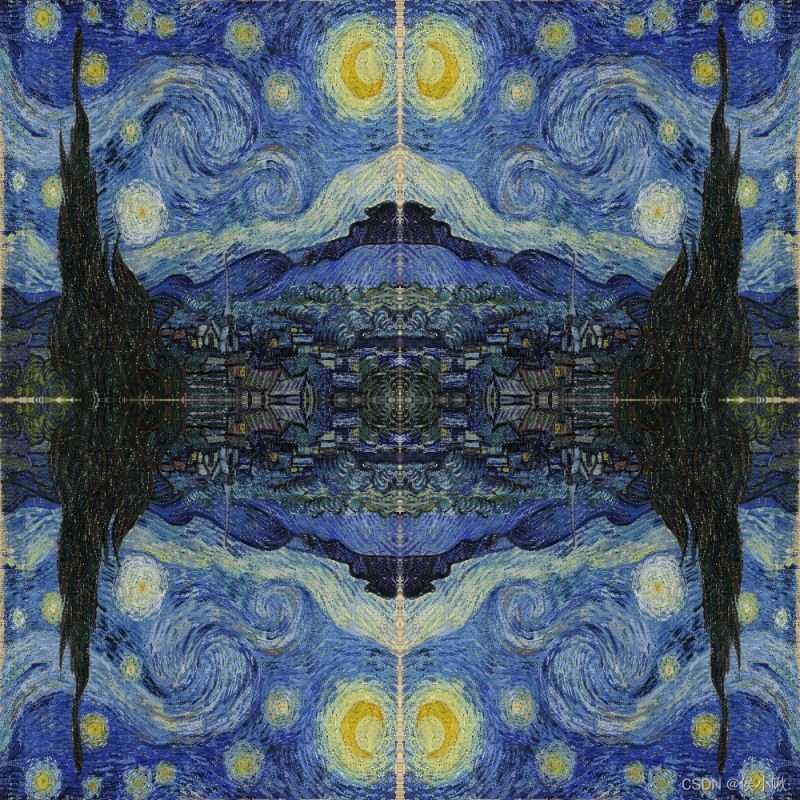
讲原图经过着三种翻转后,与原图拼在一块,呈现出了这种奇观:
import cv2
img = cv2.imread("The_Starry_Night.jpg")
dst1 = cv2.flip(img, 0)
dst2 = cv2.flip(img, 1)
dst3 = cv2.flip(img, -1)
cv2.imshow("img", img)
cv2.imshow("dst1", dst1)
cv2.imshow("dst2", dst2)
cv2.imshow("dst3", dst3)
cv2.waitKey()
cv2.destroyAllWindows()
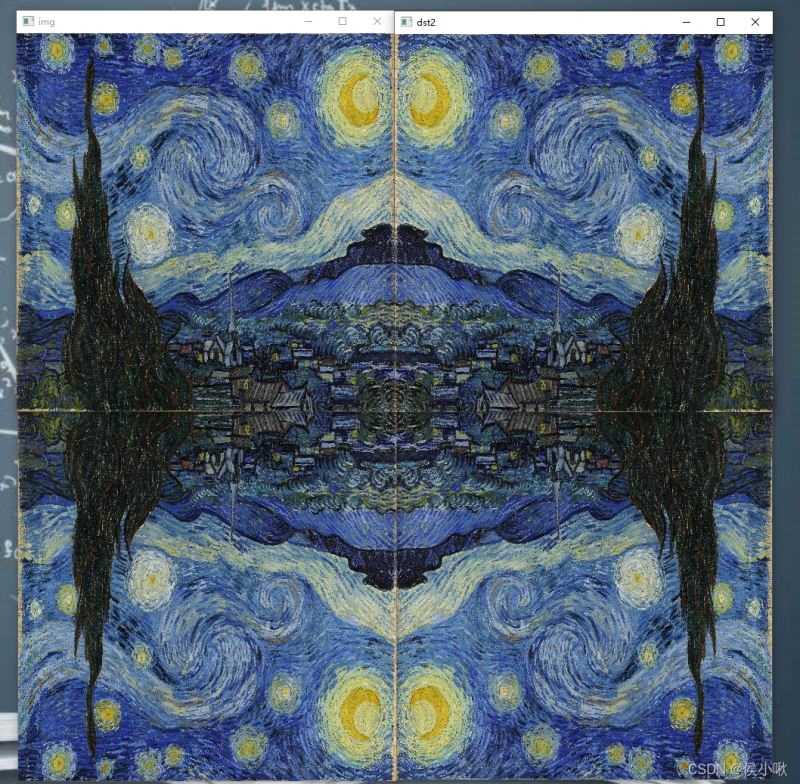
将翻转结果放在同一张画布中
import cv2
import numpy as np
img = cv2.imread("The_Starry_Night.jpg")
dst1 = cv2.flip(img, 0)
dst2 = cv2.flip(img, 1)
dst3 = cv2.flip(img, -1)
a, b, c = img.shape
canvas = np.ones((2 * a, 2 * b, c), np.uint8) * 255
canvas[0:b, 0:a] = img
canvas[b:2*b, 0:a] = dst1
canvas[0:b, a:2*a] = dst2
canvas[b:2*b, a:2*a] = dst3
cv2.imshow("pic", canvas)
cv2.waitKey()
cv2.destroyAllWindows()
# 保存图片
# cv2.imwrite("final_pic", canvas)结果呈现:
3. 仿射变换 warpAffine()方法
常见的仿射变换有平移,旋转和倾斜变换。
仿射变换使用cv2.warpAffine()方法完成
warpAffine(src, M, dsize, dst=None, flags=None, borderMode=None, borderValue=None)
src 原图
M 是一个二行三列的矩阵,也称仿射矩阵。warpAffine方法根据此矩阵的值来变换像素的位置。
M = [[a, b, c], [d, e, f]],则像素的变换公式为:
X = x × a + y × b + c
Y = x × d + y × e + f
其中x,y指原像素的x、y轴坐标。X,Y指变换后的X,Y坐标。
dsize 输出图像的尺寸。(不带放缩,增大的部分用黑色色素(0)填充)
这三个参数是常用的参数。其余参数建议使用默认值。
flags表示插入方式,borderMode是边界类型,borderValue表示边界值(默认0)。dst表示反射变换后输出的图像。
3.1 平移
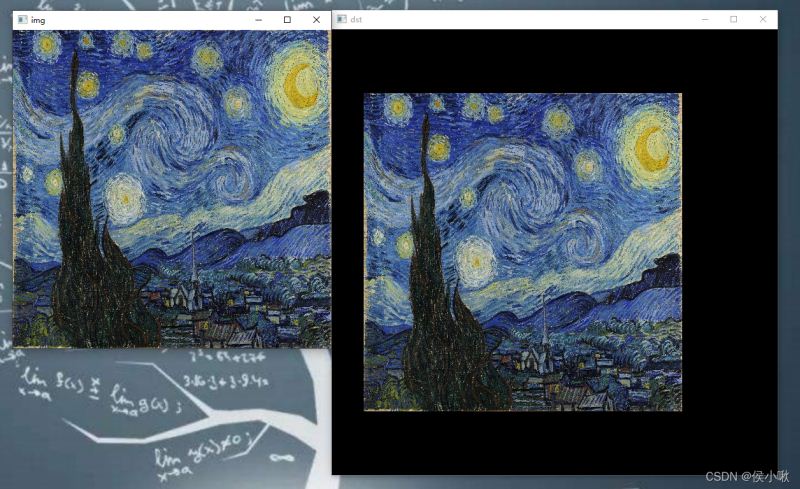
以将《星月夜》向左平移50个像素,向下平移100个像素为例。
则M数组应写为[[1, 0, 50], [0, 1, 100]]:
import cv2
import numpy as np
img = cv2.imread("The_Starry_Night.jpg")
rows = len(img)
cols = len(img[0])
M = np.float32([[1, 0, 50],
[0, 1, 100]])
dst = cv2.warpAffine(img, M, (cols, rows))
cv2.imshow("img", img)
cv2.imshow("dst", dst)
cv2.waitKey()
cv2.destroyAllWindows()
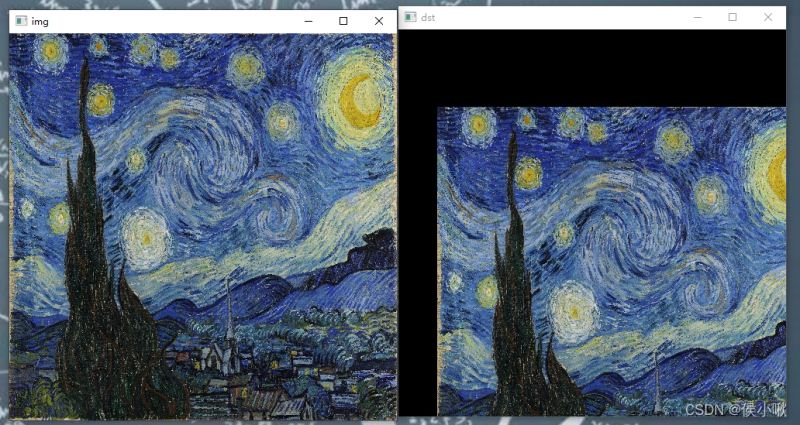
如图所示,图像按照我们的预期成功被平移。
只是这样得到的图像有色素损失,我们丢失了超出画布之外的数据。
为了避免损失,可以取设置dsize参数来控制输出图像的大小。
修改后的代码如下:
import cv2
import numpy as np
img = cv2.imread("The_Starry_Night.jpg")
rows = len(img)
cols = len(img[0])
M = np.float32([[1, 0, 50],
[0, 1, 100]])
dst = cv2.warpAffine(img, M, (cols+200, rows+200))
cv2.imshow("img", img)
cv2.imshow("dst", dst)
cv2.waitKey()
cv2.destroyAllWindows()
优化后的程序执行效果:
3.2 旋转
旋转也是通过M矩阵来实现的,这个矩阵的运算较复杂,
OpenCV提供了getRotationMatrix2D()方法来计算旋转操作的M矩阵
getRotationMatrix2D(center, angle, scale)
center 指旋转中心的坐标
angle指旋转的角度
scale值缩放的比例。(旋转过程支持缩放)
import cv2
img = cv2.imread("The_Starry_Night.jpg")
rows = len(img)
cols = len(img[0])
center = (rows / 2, cols / 2)
M = cv2.getRotationMatrix2D(center, 30, 0.8)
dst = cv2.warpAffine(img, M, (cols, rows))
cv2.imshow("img", img)
cv2.imshow("dst", dst)
cv2.waitKey()
cv2.destroyAllWindows()
旋转效果如图所示:

3.3 倾斜
OpenCV需要定位到图像的三个点的位置来计算倾斜效果,即左上角,右上角和左下角。
图像的倾斜也是根据M矩阵实现,得出矩阵的运算较复杂,通过getAffineTransform 方法实现。
语法
getAffineTransform(src, dst)
src是原图像的左上角,右上角和左下角三个点的坐标。三维数组格式,形如[[a, b], [c, d], [e, f]]。
dst是倾斜后这三个点预期的坐标。格式同上。
要保持左上,右下,左下三个点的顺序不能乱。
以将《星月夜》保持左下角和右上角坐标不变,左上角((0,0)处)向右移动150个像素长度。
代码如下:
import cv2
import numpy as np
img = cv2.imread("The_Starry_Night.jpg")
rows = len(img)
cols = len(img[0])
p1 = np.array([[0, 0], [cols - 1, 0], [0, rows - 1]], dtype=np.float32)
p2 = np.array([[150, 0], [cols - 1, 0], [0, rows - 1]], dtype=np.float32)
M = cv2.getAffineTransform(p1, p2)
dst = cv2.warpAffine(img, M, (cols, rows))
cv2.imshow('img', img)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()
程序执行效果如下:

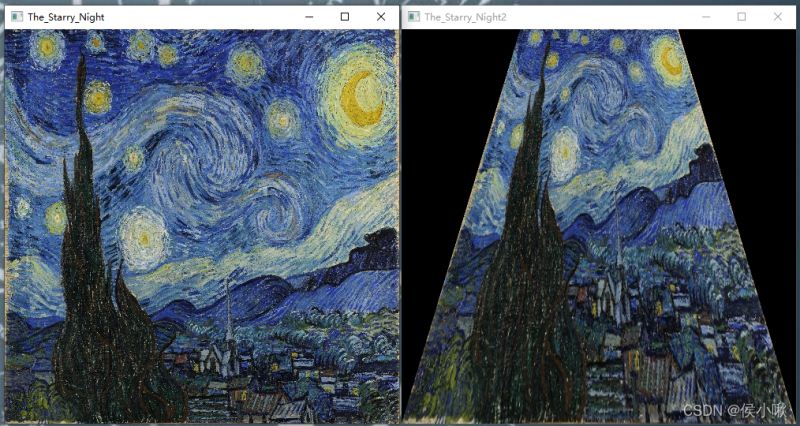
4. 透视
透视的实现使用的是warpPerspective()方法,而不再是用于平移、旋转、倾斜的warpAffine()方法。
使用warpPerspective()方法也需要通过M矩阵来计算透视效果,计算透视的M矩阵可以使用getPerspectiveTransform()方法。
getPerspectiveTransform(src, dst, solveMethod=None)
该方法常用的参数有两个,分别为原图的四个点的坐标(scr) 和 透视后四个点的坐标(dst)。Opcv需要通过定位图像的这四个点来计算透视效果。四个点依次为左上,右上,左下,右下。
坐标格式为二维数组格式,形如[[a, b],[c, d],[e, f],[g, h]]。
示例代码如下:
import cv2
import numpy as np
img = cv2.imread("The_Starry_Night.jpg")
rows = len(img)
cols = len(img[0])
# 原图的四点坐标
p1 = np.zeros((4, 2), np.float32)
p1[0] = [0, 0]
p1[1] = [cols - 1, 0]
p1[2] = [0, rows - 1]
p1[3] = [cols - 1, rows - 1]
# 透视后的四点坐标
p2 = np.zeros((4, 2), np.float32)
p2[0] = [150, 0]
p2[1] = [cols - 150, 0]
p2[2] = [0, rows - 1] # 不变
p2[3] = [cols - 1, rows - 1] # 不变
M = cv2.getPerspectiveTransform(p1, p2)
dst = cv2.warpPerspective(img, M, (cols, rows))
cv2.imshow('The_Starry_Night', img)
cv2.imshow('The_Starry_Night2', dst)
cv2.waitKey()
cv2.destroyAllWindows()展示原图和透视后的图像效果:
加载全部内容