opencv 摄像机标定
默凉 人气:0原图
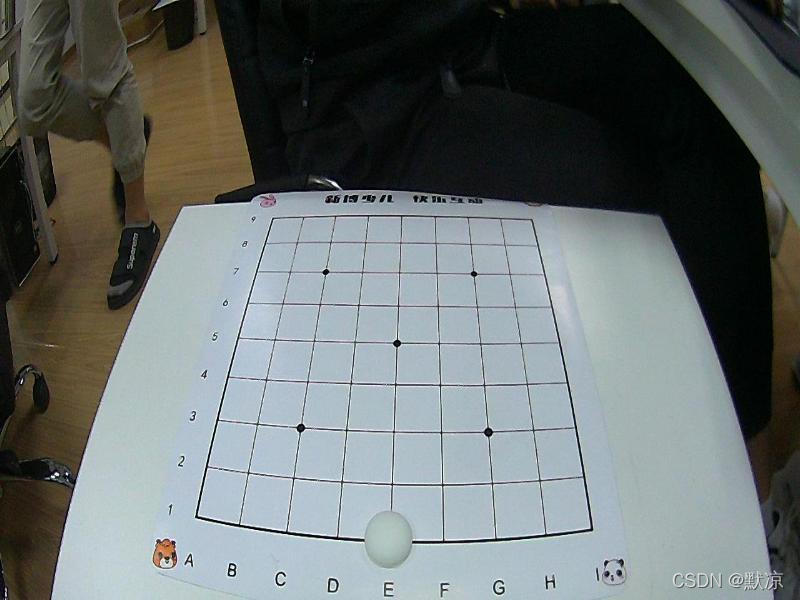
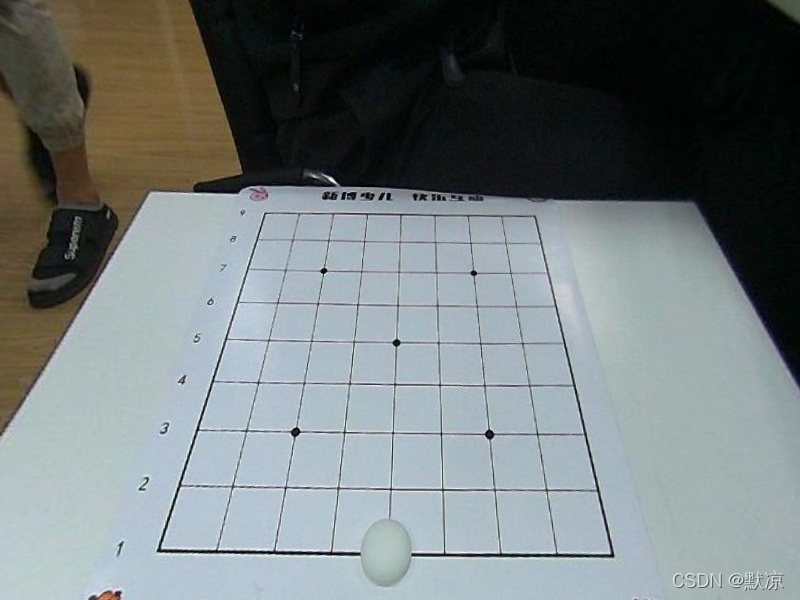
矫正后
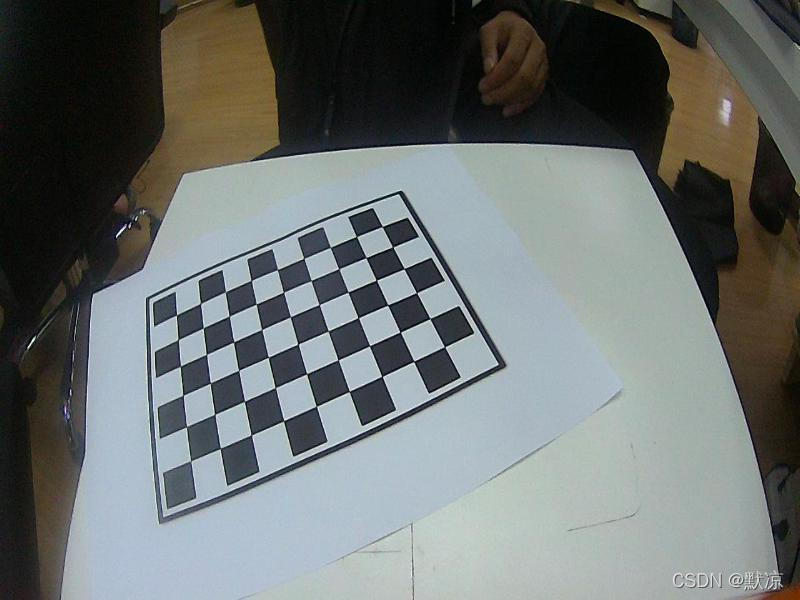
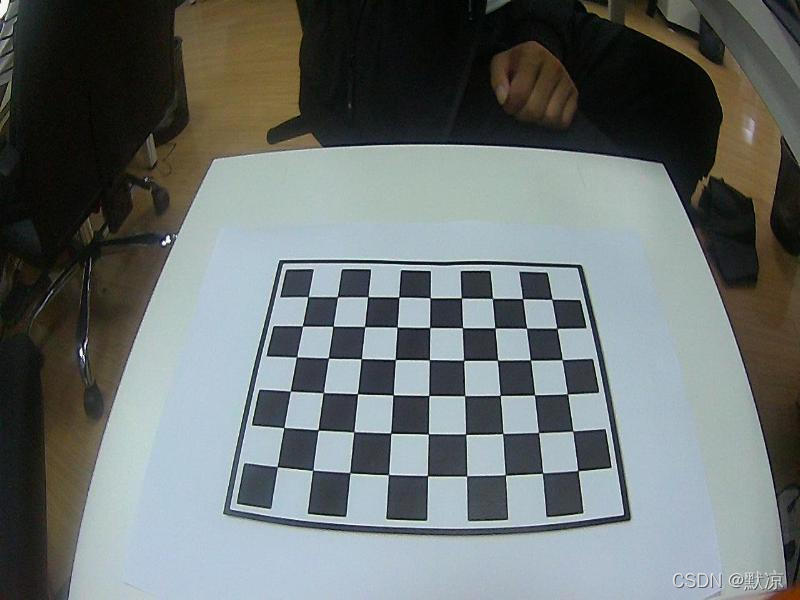
我新建了个jz的文件夹放相机矫正所需要拍摄的图片,如下:共12张


# coding:utf-8
import cv2
import numpy as np
import glob
# 找棋盘格角点
# 阈值
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 棋盘格模板规格 从0开始计算
w = 9
h = 6
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w * h, 3), np.float32)
objp[:, :2] = np.mgrid[0:w, 0:h].T.reshape(-1, 2)
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点
# 匹配读取文件夹内的特定文件
images = glob.glob('jz/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 找到棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, (w, h), None)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w, h), corners, ret)
cv2.imshow('findCorners', img)
cv2.waitKey(500)
cv2.destroyAllWindows()
# 如果找到足够点对,将其存储起来
if ret == True:
cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
objpoints.append(objp)
imgpoints.append(corners)
# 标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# 在应用时,将下面两个写死
print(mtx)
print(dist)
# 去畸变
img2 = cv2.imread('77.jpg')
h, w = img2.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 0, (w, h)) # 自由比例参数
dst = cv2.undistort(img2, mtx, dist, None, newcameramtx)
# 根据前面ROI区域裁剪图片
# x,y,w,h = roi
# dst = dst[y:y+h, x:x+w]
cv2.imwrite('1.jpg', dst)
cv2.imshow('findCorners', dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
加载全部内容