opencv 模板匹配
R-G-B 人气:0一 简单实现
#include <opencv2/opencv.hpp>
#include<iostream>
using namespace cv;
using namespace std;
int main()
{
Mat img = imread("52.jpg");
Mat templ = imread("templ.jpg");
Mat result;
matchTemplate(img,templ,result,TM_CCOEFF_NORMED);//原图,模板,匹配方法
double maxVal, minVal;
Point maxLoc, minLoc;
//寻找最大值,最小值
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc);
//绘制矩形,矩形的左上角是最大值的位置,右下角是在最大值上加上模板的行宽和和列高
rectangle(img,Point(maxLoc.x,maxLoc.y),Point(maxLoc.x+templ.cols,maxLoc.y+templ.rows),Scalar(0,0,255),2);//颜色红色,粗度2
imshow("原图", img);
imshow("模板",templ);
imshow("result",result);
waitKey(0);
return 0;
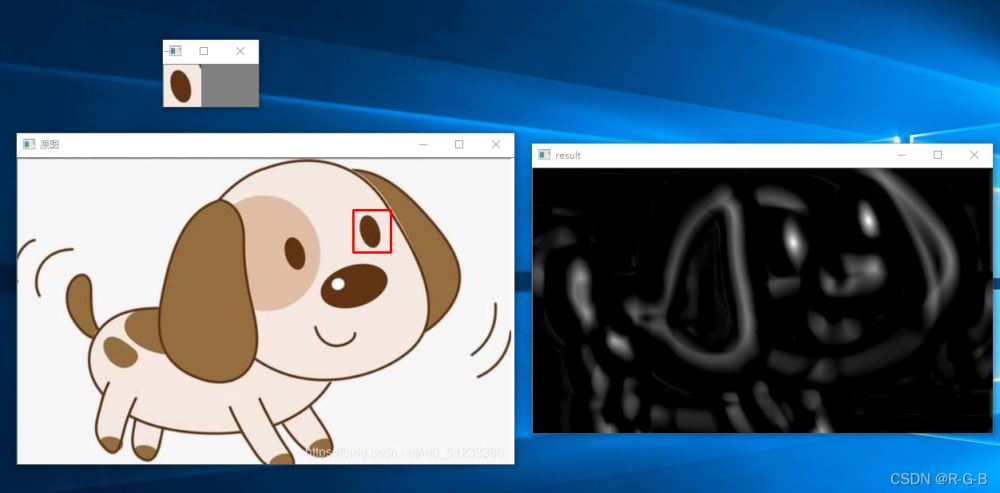
}结果如下,分别是模板图,原图(找到了与模板匹配的部分,并矩形框标记,结果图,暂时觉得有点问题的 )
二 函数及原理讲解
1 matchTemplate()参数详解
matchTemplate( InputArray image, InputArray templ,OutputArray result, int method );
image:待匹配的源图像
templ:模板图像
result:保存结果的矩阵,我们可以通过minMaxLoc() 确定结果矩阵的最大值和最小值的位置.
method :模板匹配的算法
有以下六种:
enum { TM_SQDIFF=0, TM_SQDIFF_NORMED=1, TM_CCORR=2, TM_CCORR_NORMED=3, TM_CCOEFF=4, TM_CCOEFF_NORMED=5 };TM_SQDIFF,TM_SQDIFF_NORMED匹配数值越低表示匹配效果越好,其它四种反之。
TM_SQDIFF_NORMED,TM_CCORR_NORMED,TM_CCOEFF_NORMED是标准化的匹配,得到的最大值,最小值范围在0~1之间,其它则需要自己对结果矩阵归一化。
不同的方法会得到差异很大的结果,可以通过测试选择最合适的方法。
cv::TM_SQDIFF 判断 minVal 越小,效果越好
计算模板与目标图像的方差,由于是像素值差值的平方的和,所以值越小匹配程度越高;
cv::TM_SQDIFF_NORMED 判断 minVal 越接近0,效果越好
范化的cv::TM_SQDIFF,取值为0-1之间,完美匹配返回值为0;
cv::TM_CCORR 判断 maxVal 越大,效果越好
使用dot product计算匹配度,越高匹配度就好;
cv::TM_CCORR_NORMED 判断 maxVal 越接近1,效果越好
范化的cv::TM_CCORR,0-1之间,我用的这个;
cv::TM_CCOEFF 判断 maxVal 越大,效果越好
采用模板与目标图像像素与各自图像的平均值计算dot product,正值越大匹配度越高,负值越大图像的区别越大,但如果图像没有明显的特征(即图像中的像素值与平均值接近)则返回值越接近0;
cv::TM_CCOEFF_NORMED 判断 maxVal 越接近1,效果越好
范化的cv::TM_CCOEFF,-1 ~ 1之间。
2 minMaxLoc()函数
查找全局最小和最大稀疏数组元素并返回其值及其位置
void minMaxLoc(const SparseMat& a, double* minVal,double* maxVal, int* minIdx=0, int* maxIdx=0);
a: 匹配结果矩阵
&minVal 和 &maxVal: 在矩阵 result 中存储的最小值和最大值
&minLoc 和 &maxLoc: 在结果矩阵中最小值和最大值的坐标.
加载全部内容