pytorch多个Dataloader训练 pytorch 实现多个Dataloader同时训练
陈麒任 人气:0看代码吧~

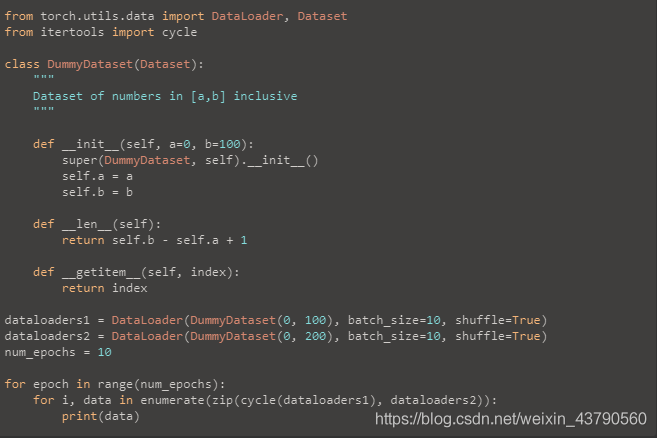
如果两个dataloader的长度不一样,那就加个:
from itertools import cycle
仅使用zip,迭代器将在长度等于最小数据集的长度时耗尽。 但是,使用cycle时,我们将再次重复最小的数据集,除非迭代器查看最大数据集中的所有样本。
补充:pytorch技巧:自定义数据集 torch.utils.data.DataLoader 及Dataset的使用
本博客中有可直接运行的例子,便于直观的理解,在torch环境中运行即可。
1. 数据传递机制
在 pytorch 中数据传递按一下顺序:
1、创建 datasets ,也就是所需要读取的数据集。
2、把 datasets 传入DataLoader。
3、DataLoader迭代产生训练数据提供给模型。
2. torch.utils.data.Dataset
Pytorch提供两种数据集:
Map式数据集 Iterable式数据集。其中Map式数据集继承torch.utils.data.Dataset,Iterable式数据集继承torch.utils.data.IterableDataset。
本文只介绍 Map式数据集。
一个Map式的数据集必须要重写 __getitem__(self, index)、 __len__(self) 两个方法,用来表示从索引到样本的映射(Map)。 __getitem__(self, index)按索引映射到对应的数据, __len__(self)则会返回这个数据集的长度。
基本格式如下:
import torch.utils.data as data
class VOCDetection(data.Dataset):
'''
必须继承data.Dataset类
'''
def __init__(self):
'''
在这里进行初始化,一般是初始化文件路径或文件列表
'''
pass
def __getitem__(self, index):
'''
1. 按照index,读取文件中对应的数据 (读取一个数据!!!!我们常读取的数据是图片,一般我们送入模型的数据成批的,但在这里只是读取一张图片,成批后面会说到)
2. 对读取到的数据进行数据增强 (数据增强是深度学习中经常用到的,可以提高模型的泛化能力)
3. 返回数据对 (一般我们要返回 图片,对应的标签) 在这里因为我没有写完整的代码,返回值用 0 代替
'''
return 0
def __len__(self):
'''
返回数据集的长度
'''
return 0
可直接运行的例子:
import torch.utils.data as data
import numpy as np
x = np.array(range(80)).reshape(8, 10) # 模拟输入, 8个样本,每个样本长度为10
y = np.array(range(8)) # 模拟对应样本的标签, 8个标签
class Mydataset(data.Dataset):
def __init__(self, x, y):
self.x = x
self.y = y
self.idx = list()
for item in x:
self.idx.append(item)
pass
def __getitem__(self, index):
input_data = self.idx[index] #可继续进行数据增强,这里没有进行数据增强操作
target = self.y[index]
return input_data, target
def __len__(self):
return len(self.idx)
datasets = Mydataset(x, y) # 初始化
print(datasets.__len__()) # 调用__len__() 返回数据的长度
for i in range(len(y)):
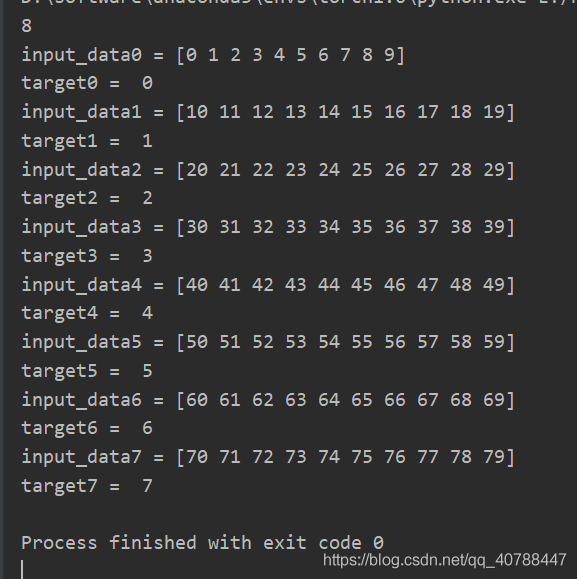
input_data, target = datasets.__getitem__(i) # 调用__getitem__(index) 返回读取的数据对
print('input_data%d =' % i, input_data)
print('target%d = ' % i, target)
结果如下:
3. torch.utils.data.DataLoader
PyTorch中数据读取的一个重要接口是 torch.utils.data.DataLoader。
该接口主要用来将自定义的数据读取接口的输出或者PyTorch已有的数据读取接口的输入按照batch_size封装成Tensor,后续只需要再包装成Variable即可作为模型的输入。
torch.utils.data.DataLoader(onject)的可用参数如下:
1.dataset(Dataset): 数据读取接口,该输出是torch.utils.data.Dataset类的对象(或者继承自该类的自定义类的对象)。
2.batch_size (int, optional): 批训练数据量的大小,根据具体情况设置即可。一般为2的N次方(默认:1)
3.shuffle (bool, optional):是否打乱数据,一般在训练数据中会采用。(默认:False)
4.sampler (Sampler, optional):从数据集中提取样本的策略。如果指定,“shuffle”必须为false。我没有用过,不太了解。
5.batch_sampler (Sampler, optional):和batch_size、shuffle等参数互斥,一般用默认。
6.num_workers:这个参数必须大于等于0,为0时默认使用主线程读取数据,其他大于0的数表示通过多个进程来读取数据,可以加快数据读取速度,一般设置为2的N次方,且小于batch_size(默认:0)
7.collate_fn (callable, optional): 合并样本清单以形成小批量。用来处理不同情况下的输入dataset的封装。
8.pin_memory (bool, optional):如果设置为True,那么data loader将会在返回它们之前,将tensors拷贝到CUDA中的固定内存中.
9.drop_last (bool, optional): 如果数据集大小不能被批大小整除,则设置为“true”以除去最后一个未完成的批。如果“false”那么最后一批将更小。(默认:false)
10.timeout(numeric, optional):设置数据读取时间限制,超过这个时间还没读取到数据的话就会报错。(默认:0)
11.worker_init_fn (callable, optional): 每个worker初始化函数(默认:None)
可直接运行的例子:
import torch.utils.data as data
import numpy as np
x = np.array(range(80)).reshape(8, 10) # 模拟输入, 8个样本,每个样本长度为10
y = np.array(range(8)) # 模拟对应样本的标签, 8个标签
class Mydataset(data.Dataset):
def __init__(self, x, y):
self.x = x
self.y = y
self.idx = list()
for item in x:
self.idx.append(item)
pass
def __getitem__(self, index):
input_data = self.idx[index]
target = self.y[index]
return input_data, target
def __len__(self):
return len(self.idx)
if __name__ ==('__main__'):
datasets = Mydataset(x, y) # 初始化
dataloader = data.DataLoader(datasets, batch_size=4, num_workers=2)
for i, (input_data, target) in enumerate(dataloader):
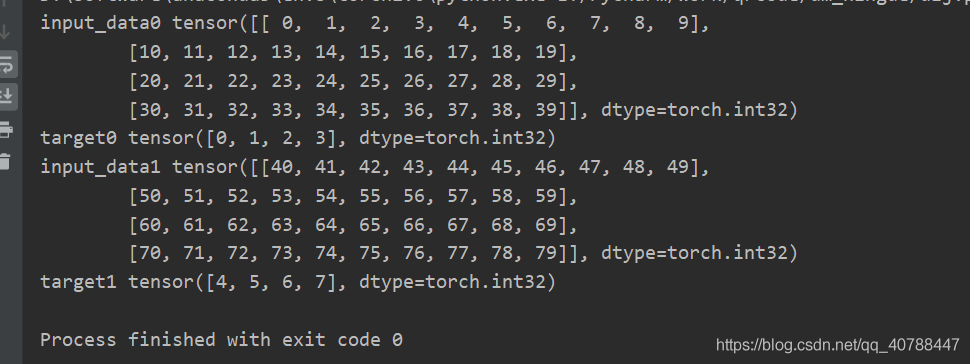
print('input_data%d' % i, input_data)
print('target%d' % i, target)
结果如下:(注意看类别,DataLoader把数据封装为Tensor)
以上为个人经验,希望能给大家一个参考,也希望大家多多支持。
加载全部内容