OpenCV 轮廓检测的实现方法
人气:0轮廓概述
- 轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度。轮廓在形状分析和物体的检测和识别中很有用。
- 为了更加准确,要使用二值化图像。在寻找轮廓之前,要进行阈值化处理或者 Canny 边界检测。
- 查找轮廓的函数会修改原始图像。如果你在找到轮廓之后还想使用原始图像的话,你应该将原始图像存储到其他变量中。
- 在 OpenCV 中,查找轮廓就像在黑色背景中超白色物体,要找的物体应该是白色而背景应该是黑色。
轮廓检测的作用:
1.可以检测图图像或者视频中物体的轮廓
2.计算多边形边界,形状逼近和计算感兴趣区域
先看一个较为简单的轮廓检测:
import cv2
import numpy as np
# 创建一个200*200的黑色空白图像
img = np.zeros((200, 200), dtype=np.uint8)
# 利用numpy数组在切片上赋值的功能放置一个白色方块
img[50:150, 50:150] = 255
# 对图像进行二值化操作
# threshold(src, thresh, maxval, type, dst=None)
# src是输入数组,thresh是阈值的具体值,maxval是type取THRESH_BINARY或者THRESH_BINARY_INV时的最大值
# type有5种类型,这里取0: THRESH_BINARY ,当前点值大于阈值时,取maxval,也就是前一个参数,否则设为0
# 该函数第一个返回值是阈值的值,第二个是阈值化后的图像
ret, thresh = cv2.threshold(img, 127, 255, 0)
# findContours()有三个参数:输入图像,层次类型和轮廓逼近方法
# 该函数会修改原图像,建议使用img.copy()作为输入
# 由函数返回的层次树很重要,cv2.RETR_TREE会得到图像中轮廓的整体层次结构,以此来建立轮廓之间的‘关系'。
# 如果只想得到最外面的轮廓,可以使用cv2.RETE_EXTERNAL。这样可以消除轮廓中其他的轮廓,也就是最大的集合
# 该函数有三个返回值:修改后的图像,图像的轮廓,它们的层次
image, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
color = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
img = cv2.drawContours(color, contours, -1, (0, 255, 0), 2)
cv2.imshow("contours", color)
cv2.waitKey()
cv2.destroyAllWindows()

上面是找到一个正方形的轮廓,下面看如何找到不规则的多边形轮廓:
import cv2
import numpy as np
# pyrDown():brief Blurs an image and downsamples it.
# 将图像高斯平滑,然后进行降采样
img = cv2.pyrDown(cv2.imread("hammer.jpg", cv2.IMREAD_UNCHANGED))
# 依然是二值化操作
ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY), 127, 255, cv2.THRESH_BINARY)
# 计算图像的轮廓
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
# find bounding box coordinates
# 先计算出一个简单的边界狂,也就是一个矩形啦
# 就是将轮廓信息转换为(x,y)坐标,并加上矩形的高度和宽度
x, y, w, h = cv2.boundingRect(c)
# 画出该矩形
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)
# find minimum area
# 然后计算包围目标的最小矩形区域
# 这里先计算出最小矩形区域,然后计算区域的顶点,此时顶点坐标是浮点型,但是像素坐标是整数
# 需要将浮点型转换成矩形
rect = cv2.minAreaRect(c)
box = cv2.boxPoints(rect)
box = np.int0(box)
# draw contours
# 画出最小矩形
# drawContours()也会修改源图像
# 第二个参数保存轮廓的数组,也就是保存着很多轮廓
# 第三个参数是要绘制的轮廓数组的索引:-1是绘制所有的轮廓,否则只绘制[box]中指定的轮廓
# 颜色和thickness(密度,就是粗细)放在最后两个参数
cv2.drawContours(img, [box], 0, (0, 0, 255), 3)
# calculate center and radius of minimum enclosing circle
# 最后检查的边界轮廓为最小闭圆
# minEnclosingCircle()会返回一个二元数组,第一个是圆心坐标组成的元祖,第二个元素是元的半径
(x, y), radius = cv2.minEnclosingCircle(c)
# cast to integers
center = (int(x), int(y))
radius = int(radius)
# draw the circle
img = cv2.circle(img, center, radius, (255, 0, 0), 3)
# 绘制轮廓
cv2.drawContours(img, contours, -1, (255, 0, 0), 1)
cv2.imshow("contours", img)
cv2.waitKey()
cv2.destroyAllWindows()

凸轮廓与Douglas-Peucker算法
import cv2
import numpy as np
img = cv2.pyrDown(cv2.imread("hammer.jpg", cv2.IMREAD_UNCHANGED))
ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY), 127, 255, cv2.THRESH_BINARY)
# 创建与源图像一样大小的矩阵
black = cv2.cvtColor(np.zeros((img.shape[1], img.shape[0]), dtype=np.uint8), cv2.COLOR_GRAY2BGR)
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
# 得到轮廓的周长作为参考
epsilon = 0.01 * cv2.arcLength(cnt,True)
# approxPolyDP()用来计算近似的多边形框。有三个参数
# cnt为轮廓,epsilon为ε——表示源轮廓与近似多边形的最大差值,越小越接近
# 第三个是布尔标记,用来表示这个多边形是否闭合
approx = cv2.approxPolyDP(cnt,epsilon,True)
# convexHull()可以从轮廓获取凸形状
hull = cv2.convexHull(cnt)
# 源图像轮廓-绿色
cv2.drawContours(black, [cnt], -1, (0, 255, 0), 2)
# 近似多边形-蓝色
cv2.drawContours(black, [approx], -1, (255, 0, 0), 2)
# 凸包-红色
cv2.drawContours(black, [hull], -1, (0, 0, 255), 2)
cv2.imshow("hull", black)
cv2.waitKey()
cv2.destroyAllWindows()
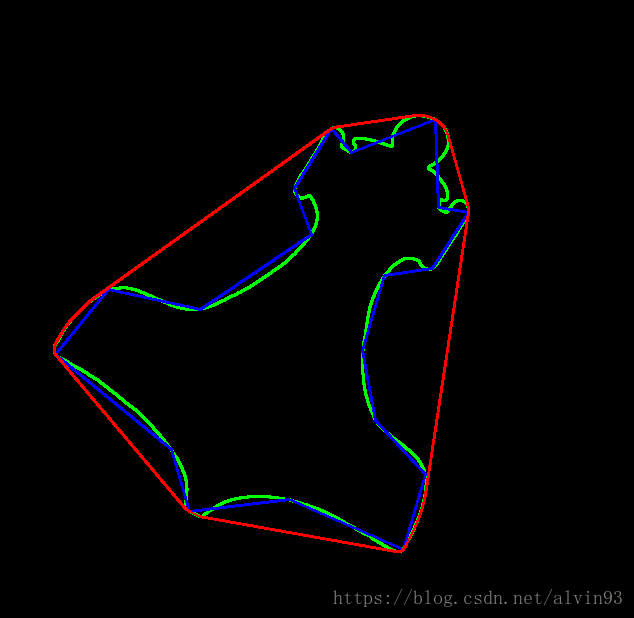
本来也有疑问,有了一个精确的轮廓,为什么还需要一个近似的多边形?
书中给出答案,近似多边形是由一组直线构成,这样可以便于后续的操作和处理。
想来也是,直线构成的区域总是比无限个曲率的曲线构成的区域方便处理。
直线和圆检测
直线检测可以通过HoughLinesP函数完成,HoughLinesP是标准Hough变换经过优化,使用概率Hough变换。
import cv2
import numpy as np
img = cv2.imread('lines.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray,50,120)
# 最小直线长度,小于该长度会被消除
minLineLength = 20
# 最大线段间隙,一条直线的间隙长度大于这个值会被认为是两条直线
maxLineGap = 5
# HoughLinesP()会接受一个由Canny边缘检测滤波器处理过的单通道二值图像
# 不一定需要Canny滤波器,但是输入是去噪且只有边缘的图像,效果会很好
# 第一个参数是输入图像
# 第二、第三个参数是线段的几何表示rho和theta,一般取1和np.pi/180
# 第四个参数是阈值,低于该阈值的直线会被忽略
# 第五第六已经解释
lines = cv2.HoughLinesP(edges,1,np.pi/180,20,minLineLength,maxLineGap)
for x1,y1,x2,y2 in lines[0]:
cv2.line(img,(x1,y1),(x2,y2),(0,255,0),2)
cv2.imshow("edges", edges)
cv2.imshow("lines", img)
cv2.waitKey()
cv2.destroyAllWindows()
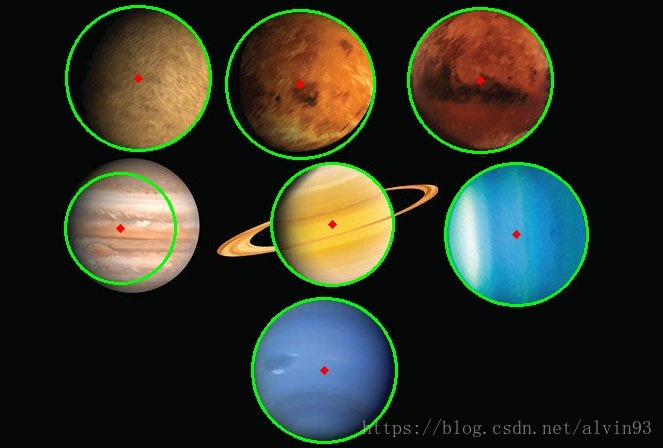
圆检测可以通过HoughCircles函数检测。
import cv2
import numpy as np
planets = cv2.imread('planet_glow.jpg')
gray_img = cv2.cvtColor(planets, cv2.COLOR_BGR2GRAY)
img = cv2.medianBlur(gray_img, 5)
cimg = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
# 与直线检测类似,需要圆心距的最小距离和圆的最小以及最大半径
circles = cv2.HoughCircles(img,cv2.HOUGH_GRADIENT,1,120,param1=100,param2=30,minRadius=0,maxRadius=0)
circles = np.uint16(np.around(circles))
for i in circles[0,:]:
# draw the outer circle
cv2.circle(planets,(i[0],i[1]),i[2],(0,255,0),2)
# draw the center of the circle
cv2.circle(planets,(i[0],i[1]),2,(0,0,255),3)
cv2.imwrite("planets_circles.jpg", planets)
cv2.imshow("HoughCirlces", planets)
cv2.waitKey()
cv2.destroyAllWindows()
有一个问题,该方法检测出来的第二行的第一个星球的圆检测与书中不一样。
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持。
您可能感兴趣的文章:
加载全部内容