opencv3/C++ 实现SURF特征检测
人气:0SURF即Speeded Up Robust Features加速鲁棒特征;
SURF可以用于对象定位和识别、人脸识别、3D重建、对象跟踪和提取兴趣点等。
工作原理:
1、选择图像中POI(Points of Interest) Hessian Matrix;
2、在不同的尺度空间发现关键点,非最大信号压制;
3、发现特征点方法、旋转不变性要求;
4、生成特征向量;
类SURF中成员函数create()参数说明:
static Ptr<SURF> create( double hessianThreshold=100,//SURF中使用的hessian关键点检测器的阈值 int nOctaves = 4, //关键点检测器将使用的金字塔组数量 int nOctaveLayers = 3,//高斯金字塔每个组内图像的层数 bool extended = false, //扩展描述符标志(true使用扩展的128个元素的描述符,false使用64个元素的描述符) bool upright = false//旋转的特征标志(true不计算方向,false计算方向) );
函数detect()用来检测图像或图像集中的关键点。
基类Feature2D中成员函数detect()参数说明:
void detect( InputArray image,//图像 CV_OUT std::vector<KeyPoint>& keypoints,//检测到的关键点,(在图像集中关键点[i]是在图像[i]中检测到的一组关键点) InputArray mask=noArray() //指定在哪里寻找关键点的掩码(必须是在感兴趣区域中具有非零值的8位整数矩阵) );
函数drawKeypoints()的参数说明:
void drawKeypoints( InputArray image, //源图像 const std::vector<KeyPoint>& keypoints, //来自源图像的关键点 InputOutputArray outImage,//输出图像 const Scalar& color=Scalar::all(-1), //关键点的颜色 int flags=DrawMatchesFlags::DEFAULT //设置绘图功能的标志 );
函数drawKeypoints()用来绘制关键点。
SURF特征检测示例:
#include<opencv2/opencv.hpp>
#include<opencv2/xfeatures2d.hpp>
using namespace cv;
using namespace cv::xfeatures2d;
Mat src;
int minHessian = 50;
void trackBar(int, void*);
int main()
{
src = imread("E:/image/image/bdb.jpg");
if (src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
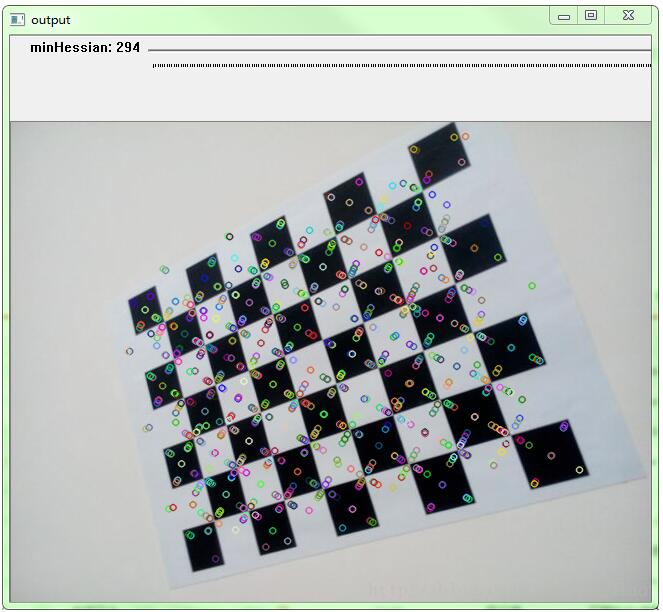
namedWindow("output", WINDOW_AUTOSIZE);
createTrackbar("minHessian","output",&minHessian, 500, trackBar);
waitKey(0);
return 0;
}
void trackBar(int, void*)
{
Mat dst;
// SURF特征检测
Ptr<SURF> detector = SURF::create(minHessian);
std::vector<KeyPoint> keypoints;
detector->detect(src, keypoints, Mat());
// 绘制关键点
drawKeypoints(src, keypoints, dst, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("output", dst);
}
以上这篇opencv3/C++ 实现SURF特征检测就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持。
您可能感兴趣的文章:
加载全部内容