C++使用OpenCV实现证件照蓝底换成白底功能(或其他颜色如红色)详解
人气:0本文实例讲述了C++使用OpenCV实现证件照蓝底换成白底功能(或其他颜色如红色)。分享给大家供大家参考,具体如下:
今天刚好老师要办点事情,老师唯一的一张证件照是蓝色的,但是需要的底色是白色的,于是乎,好久不折腾的PS也忘记了,还好旁边的刚来的小学弟懂一点,
在那里慢慢的帮老师一点点的处理,PS在边缘的地方效果还真不咋地,确实是一门技术活。
于是我就想OpenCV能不能实现呢?一搜百度第一篇就是,但是人家转成红色,然后我又对HSV颜色空间不是很懂,最后在一个学习群里
但是文中未对HSV那一块做出解释,可能是我太菜了
贴出去问了下,一位优秀的本科生帮我清晰解答了,汗颜
主要步骤为:
1.把RGB图像转换到HSV空间
2.取背景的一小块20*20,计算蓝色背景的平均色调和饱和度
3.设置阈值,取出蓝色背景替换为红色背景
4.把HSV图像转换会RGB空间
5.滤波器去除边缘效应
具体代码为:
// change_color.cpp : 定义控制台应用程序的入口点。
//证件照从蓝色底换成红色底
//#include "stdafx.h"
#include <iostream>
#include <opencv2\core\core.hpp>
#include <opencv2\highgui\highgui.hpp>
#include <opencv2\imgproc\imgproc.hpp>
using namespace cv;
using namespace std;
int main()
{
char *origin="Original";
char *window="Image";
char *str="C:\\Users\\ltc\\Desktop\\nihao.jpg";
namedWindow(origin,1);
namedWindow(window,1);
Mat image=imread(str);
if(!image.data)
{
cout<<"图像载入出现问题"<<endl;
return 0;
}
Mat roi=image(Rect(20,20,20,20));
Mat hsvImg;
cvtColor(image, hsvImg, CV_BGR2HSV); //将图像转换到HSV颜色空间
//分离HSV空间,v[0]为H色调,v[1]为S饱和度,v[2]为v灰度
vector<Mat> v;
split(hsvImg,v);
Mat roiH=v[0](Rect(20,20,20,20));
Mat roiS=v[1](Rect(20,20,20,20));
int SumH=0;
int SumS=0;
int avgH, avgS;//蓝底的平均色调和平均饱和度
//取一块蓝色背景,计算出它的平均色调和平均饱和度
for(int i=0; i<20; i++)
{
for(int j=0; j<20; j++)
{
/*SumH=SumH+roiH(i,j);*/
SumH=int(roiH.at<uchar>(j,i))+SumH;
SumS=int(roiS.at<uchar>(j,i))+SumS;
}
}
avgH=SumH/400;
avgS=SumS/400;
//遍历整个图像
int nl=hsvImg.rows;
int nc=hsvImg.cols;
int step=10;
for(int j=0; j<nl; j++)
{
for(int i=0; i<nc; i++)
{
//以H.S两个通道做阈值分割,把蓝色替换成红色
if((v[0].at<uchar>(j,i))<=(avgH+5) && v[0].at<uchar>(j,i)>=(avgH-5)
&&(v[1].at<uchar>(j,i))<=(avgS+40) && v[1].at<uchar>(j,i)>=(avgS-40))
{
//cout<<int(v[0].at<uchar>(j,i))<<endl;
//红色底
//v[0].at<uchar>(j,i)=0;
//白色底
v[0].at<uchar>(j,i)=0;
v[1].at<uchar>(j,i)=0; //V[0]和V[1]全调成0就是变成白色
//绿色底
//v[0].at<uchar>(j,i)=60;
//蓝色底
//v[0].at<uchar>(j,i)=120;
/*cout<<int(v[0].at<uchar>(j,i))<<endl;*/
}
}
}
Mat finImg;
merge(v,finImg);
Mat rgbImg;
cvtColor(finImg,rgbImg, CV_HSV2BGR); //将图像转换回RGB空间
imshow(origin,image);
imshow(window,rgbImg);
//加个滤波把边缘部分的值滤掉(此处应该用低通滤波器,但感觉不太好,还是不用了。)
Mat result;
GaussianBlur(rgbImg,result,Size(3,3),0.5);
imshow(window,result);
imwrite("nihaoWhite.jpg",result);
waitKey(0);
//system("pause");
return 0;
}
////遍历整个图像
//int nl=hsvImg.rows;
//int nc=hsvImg.cols * hsvImg.channels();
//for(int j=0; j<nl; j++)
//{
// uchar *data=hsvImg.ptr<uchar>(j);
// for(int i=0; i<nc; i++)
// {
// cout<<int(data[i])<<" ";
// }
//}
这里面主要说明一下:
HSV模型
倒锥形模型:
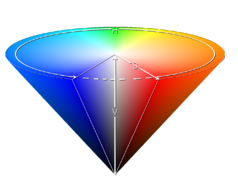
这个模型就是按色彩、深浅、明暗来描述的。
H是色彩
S是深浅, S = 0时,只有灰度
V是明暗,表示色彩的明亮程度,但与光强无直接联系,(意思是有一点点联系吧)。
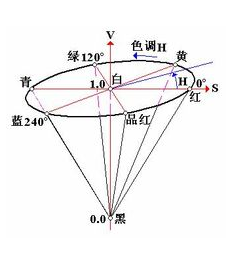
在这个程序里
色调主要是由V[0]来控制的
hsv是一个360度的模型 每个角度代表一种颜色
0度是红色
120度是绿色
240度是蓝色
但是OpenCV里最大值是255 所以它会对色调除以2,就是最大值是180
绿色对应的让它等于60 蓝色对应的就是120
换不同的背景只需要改动:
//红色底 v[0].at<uchar>(j,i)=0; //白色底 v[0].at<uchar>(j,i)=0; v[1].at<uchar>(j,i)=0; //V[0]和V[1]全调成0就是变成白色 //绿色底 v[0].at<uchar>(j,i)=60; //蓝色底 v[0].at<uchar>(j,i)=120;
改动的位置就不需要说明了吧!这个方法的效果确实不错,大赞!
毕竟是老师的图片,不能轻易放出来,网上的也不能随便用吧!哈哈
那就放张我最爱的崩坏3吧!

附录
提取图像中指定颜色的像素区域
#include<iostream>
#include<opencv2/core/core.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
using namespace cv;
class ColorDetector
{
private:
//最小可接受距离
int minDist;
//目标色
cv::Vec3b target;
//结果图像
cv::Mat result;
//计算与目标颜色的距离
int getDistance(cv::Vec3b color)
{
return abs(color[0] - target[0]) + abs(color[1] - target[1]) + abs(color[2] - target[2]);
}
public:
//空构造函数
ColorDetector() :minDist(100)
{
//初始化默认参数
target[0] = target[1] = target[2] = 0;
}
void setColorDistanceThreshold(int distance);
int getColorDistanceThreshold() const;
void setTargetColor(unsigned char red, unsigned char green, unsigned char blue);
void setTargetColor(cv::Vec3b color);
cv::Vec3b getTargetColor() const;
cv::Mat ColorDetector::process(const cv::Mat &image);
};
//设置色彩距离阈值,阈值必须是正的,否则设为0
void ColorDetector::setColorDistanceThreshold(int distance)
{
if (distance < 0)
distance = 0;
minDist = distance;
}
//获取色彩距离阈值
int ColorDetector::getColorDistanceThreshold() const
{
return minDist;
}
//设置需检测的颜色
void ColorDetector::setTargetColor(unsigned char red, unsigned char green, unsigned char blue)
{
//BGR顺序
target[2] = red;
target[1] = green;
target[0] = blue;
}
//设置需检测的颜色
void ColorDetector::setTargetColor(cv::Vec3b color)
{
target = color;
}
//获取需检测的颜色
cv::Vec3b ColorDetector::getTargetColor() const
{
return target;
}
cv::Mat ColorDetector::process(const cv::Mat &image)//核心的处理方法
{
//按需重新分配二值图像
//与输入图像的尺寸相同,但是只有一个通道
result.create(image.rows, image.cols, CV_8U);
//得到迭代器
cv::Mat_<cv::Vec3b>::const_iterator it = image.begin<cv::Vec3b>();
cv::Mat_<cv::Vec3b>::const_iterator itend = image.end<cv::Vec3b>();
cv::Mat_<uchar>::iterator itout = result.begin<uchar>();
for (; it != itend; ++it, ++itout)//处理每个像素
{
//计算离目标颜色的距离
if (getDistance(*it) < minDist)
{
*itout = 255;
}
else
{
*itout = 0;
}
}
return result;
}
int _tmain(int argc, _TCHAR* argv[])
{
//1.创建图像处理的对象
ColorDetector cdetect;
//2.读取输入图像
cv::Mat image = cv::imread("boldt.jpg");
if (!image.data)
{
return 0;
}
//3.设置输入参数
cdetect.setTargetColor(130, 190, 230);//蓝天的颜色
cv::namedWindow("result");
//4.处理并显示结果
cv::imshow("result", cdetect.process(image));
cv::waitKey();
return 0;
}
希望本文所述对大家C++程序设计有所帮助。
您可能感兴趣的文章:
加载全部内容