Channel Estimation for High Speed Wireless Systems using Gaussian Particle Filter and Auxiliary Pa
BurtonChang 人气:1目录
- 论文来源
- 摘要
- 基本概念
- 1.时变信道
- 2.粒子滤波
- 3.高斯粒子滤波
- 4.辅助粒子滤波
- 比较
- 借鉴之处
论文来源
International Conference on Communication and Signal Processing, April 4-6, 2019, India,Gargi Rajam, P. Sandeeptha and Sudheesh P 摘要
无线通信系统是从一个设备到另一个设备的传输介质。由于多径和多普勒频移,无误差传播变得不可能被实现。信道估计作为一种提高无线系统传输可靠性的技术变得越来越受欢迎。本篇论文通过使用GPF(Gaussian Particle Filter)和APF(Auxiliary Particle Filter)来进行信道估计。
基本概念
1.时变信道
在移动通信系统中由于收发双方的信道随着周围环境的变化而改变,但是由于系统的高移动性,使得信道发生快速变化.在接收端就会接收到由于多径产生的不同的频率响应.而使用PF(Particle Filter)或者SMC(Sequential Monte Carlo)可以解决这个问题.状态方程如下:
\[h_t = Ah_{t-1} + w_t\]
\[y_t = x_t*h_{t} + v_t\]
其中, A是协方差矩阵如下所示:
\[ A= \left\{ \begin{matrix} a_{11} & \cdots & a_{1n}\\ \vdots & \ddots & \vdots \\ a_{n1} & \cdots & a_{nn} \end{matrix} \right\} \]
\(x_t= \left[ \begin{matrix} x_t(0) & \cdots & x_t(m-1) \end{matrix} \right]\) 是第t个时刻的输入向量.
\(h_t= \left[ \begin{matrix} h_t(0) & \cdots & h_t(n-1) \end{matrix} \right]\) 是第t个时刻的信道系数.
\(y_t= \left[ \begin{matrix} y_t(0) & \cdots & y_t(m+n-1) \end{matrix} \right]\) 是第t个时刻的输出向量.
\(w_t= \left[ \begin{matrix} w_t(0) & \cdots & w_t(n-1) \end{matrix} \right]\) 是第t个时刻的系统噪声.
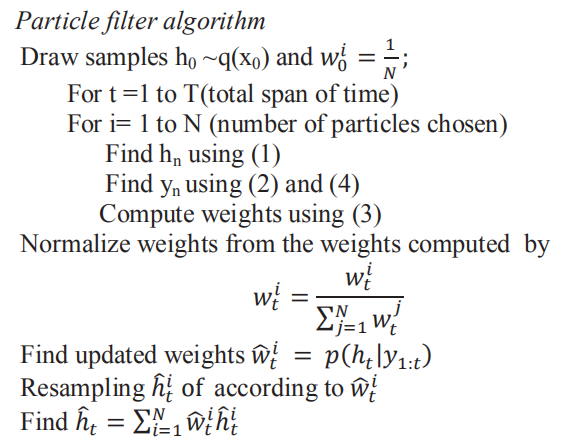
2.粒子滤波
粒子滤波器广泛应用于通信、信号处理、图像处理、视觉和目标跟踪等领域.具体算法如下:
1)初始化N个权重相等的随机粒子.
2)根据贝叶斯公式:\(zw_t \propto w^i_{t-1}* \frac{p(y_t|x^i_t)p(y_t|x^i_{t-1})}{q(x^i_t|x^i_{t-1},y_t)}\) .权重近似为:\(w_t = p(y_t|h^i_t)\)
3) 重采样
具体如下图所示:
3.高斯粒子滤波
GPF(Gaussian Particle Filter)比EKF(Extend Kalman Filter)和UKF(Unscented Kalman Filter)有更快的收敛性.
4.辅助粒子滤波
APF(Auxiliary Particle Filter)均匀的改变权重,防止问题过快退化.但是更好的适用于少量数据的估计.算法具体如下

比较
PF,GPF和APF估计的信道均方误差如下所示:

均方误差公式为\[ RMSE = \sqrt{ \frac{ \sum_{i=1}^T(h_t-\hat{h_t})^2}{T}} \]
GPF克服了这一问题,因为收敛速度更快,但需要更多的粒子数.
APF显示出更好的结果,不会在粒子数和通道长度之间做任何妥协.
借鉴之处
1.将同一问题的不同解决方法放在一块比较.(可提出新的优化方法)
2.使用均方误差来对不同方法估计出的信道进行评判好坏.
加载全部内容