Opencv 单目标检测 Python Opencv实现单目标检测的代码实例
lemonQQP 人气:0想了解Python Opencv实现单目标检测的代码实例的相关内容吗,lemonQQP在本文为您仔细讲解Opencv 单目标检测的相关知识和一些Code实例,欢迎阅读和指正,我们先划重点:Opencv,单目标检测,下面大家一起来学习吧。
一 简介
目标检测即为在图像中找到自己感兴趣的部分,将其分割出来进行下一步操作,可避免背景的干扰。以下介绍几种基于opencv的单目标检测算法,算法总体思想先尽量将目标区域的像素值全置为1,背景区域全置为0,然后通过其它方法找到目标的外接矩形并分割,在此选择一张前景和背景相差较大的图片作为示例。

环境:python3.7 opencv4.4.0
二 背景前景分离
1 灰度+二值+形态学 轮廓特征和联通组件
根据图像前景和背景的差异进行二值化,例如有明显颜色差异的转换到HSV色彩空间进行分割。
1 原图

2 灰度化

3 二值化

4 形态学处理
5 提取轮廓并找出目标外接矩形
代码封装:
def get_roi_contours(image_path, morph_size, num_morph):
'''
参数详解:
image_path:所需处理图片路径
morph_size:形态学处理核的大小
num_morph:进行形态学处理的次数
'''
image = cv2.imread(image_path, cv2.IMREAD_COLOR)
#灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#二值化
threhold, binary_image = cv2.threshold(gray_image, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
#形态学操作
kernel = cv2.getStructuringElement(shape=cv2.MORPH_RECT, ksize=morph_size)
morph_image = cv2.morphologyEx(binary_image, cv2.MORPH_CLOSE, kernel)
for i in range(num_morph-1):
morph_image = cv2.morphologyEx(morph_image, cv2.MORPH_CLOSE, kernel)
#查找轮廓
contours, hierarchy = cv2.findContours(morph_image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
#选取轮廓面积最大的轮廓
area = 0
max_area_index = 0
for j in range(len(contours)):
if area < cv2.contourArea(contours[j]):
max_area_index = j
area = cv2.contourArea(contours[j])
rect = cv2.boundingRect(contours[max_area_index])
return rect
6 通过联通组件找到外接矩形
代码封装:
def get_roi_ConCom(image_path, morph_size, num_morph):
'''
参数详解:
image_path:所需处理图片路径
morph_size:形态学处理核的大小
num_morph:进行形态学处理的次数
'''
image = cv2.imread(image_path, cv2.IMREAD_COLOR)
#灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#二值化
threhold, binary_image = cv2.threshold(gray_image, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
#形态学操作
kernel = cv2.getStructuringElement(shape=cv2.MORPH_RECT, ksize=morph_size)
morph_image = cv2.morphologyEx(binary_image, cv2.MORPH_CLOSE, kernel)
for i in range(num_morph-1):
morph_image = cv2.morphologyEx(morph_image, cv2.MORPH_CLOSE, kernel)
#联通组件查询
numlabels, components_img, stats, centers = cv2.connectedComponentsWithStats(morph_image, 8)
#获取除背景外的所有联通组件
stats_without_back = stats[1:]
#获取除背景外的所有联通组件的面积最大值
max_area = np.max(stats_without_back, axis=0)[-1]
#获取面积最大联通组件的index
max_area_index = stats_without_back[:, -1]==max_area
rect = stats_without_back[max_area_index]
return np.squeeze(rect)[0:4]
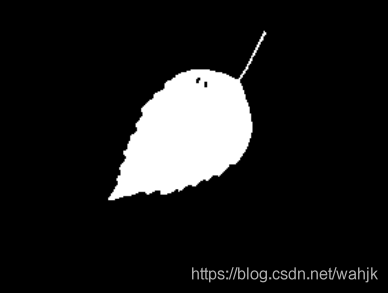
2 Kmeans聚类实现前景和背景的分离
1 kmeans聚类后的图像,由于簇的中心是随机初始化的,所以目标的像素值可能为0,也可能为1,若采用opencv的findContours则要求前景像素值为1。

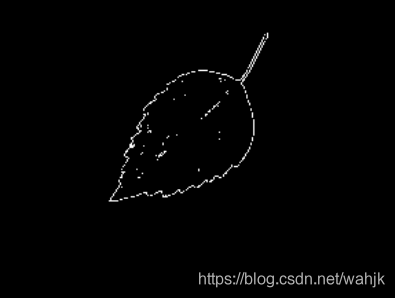
2 利用轮廓特征找外接矩形
由于Kmeans随机初始化簇中心导致前景目标像素不确定,采用边缘提取的方法再查找轮廓。
边缘图:
代码封装:
def get_roi_Kmeans(image_path): image = cv2.imread(image_path, cv2.IMREAD_COLOR) image_data = image.reshape(-1, 3).astype(np.float32) #必须要转成浮点类型进行计算 #簇内平方和,标签和每个簇的中心 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 10, 1) interia, label, centers = cv2.kmeans(image_data, 2, None, criteria, 5, cv2.KMEANS_RANDOM_CENTERS) #二值化,将标签为0的转换为255,即是目标 label[label==0] = 255 label[label==1] = 0 #转换数据类型,轮廓查找要是uint8类型数据 thresh_img = label.reshape(image.shape[0:2]).astype(np.uint8) x_grad = cv2.Sobel(thresh_img, cv2.CV_32F, 1, 0) y_grad = cv2.Sobel(thresh_img, cv2.CV_32F, 0, 1) x_grad = cv2.convertScaleAbs(x_grad) #ax + b 线性变换 y_grad = cv2.convertScaleAbs(y_grad) dst = cv2.add(x_grad, y_grad, dtype=cv2.CV_16S) #将两种sobel的加起来就可以得到整个边缘 dst = cv2.convertScaleAbs(dst) plt.imshow(dst, cmap='gray') #轮廓查找目标必须为1 contours, hierarchy = cv2.findContours(dst, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) #获取外接矩形 rect = cv2.boundingRect(contours[0]) return rect
三 总结
单目标检测较为简单,只要合理利用目标和背景的差异便可将其分离出来。当然单目标检测的方法还有很多,比如有目标模板的时候可以采用模板匹配或者均值漂移,有足够的数据集时也可采用机器学习和深度学习方法。
加载全部内容