opencv 图像轮廓 opencv 图像轮廓的实现示例
总裁余 人气:0图像轮廓
Contours:轮廓
轮廓是将没有连着一起的边缘连着一起。
边缘检测检测出边缘,边缘有些未连接在一起。

注意问题
1.对象为二值图像,首先进行阈值分割或者边缘检测。
2.查找轮廓需要更改原始图像,通常使用原始图像的一份进行拷贝。
3.在opencv里,是从黑色背景里找白色。因此对象必须是白色,背景为黑色。
方法
- cv2.findContours()
- cv2.drawContours()
通过cv2.findContours() 查找轮廓在哪里,再通过 cv2.drawContours()将查找的轮廓绘制出来。
contours,hierarchy=cv2.findContours(image,mode,method)
contours:轮廓
hierarchy:图像的拓扑信息(轮廓层次)(存储上一个轮廓,父轮廓…)
image:原始图像
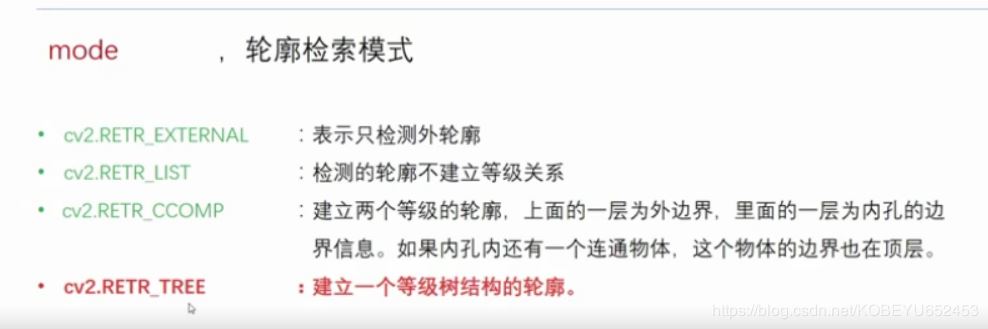
mode:轮廓检索方式
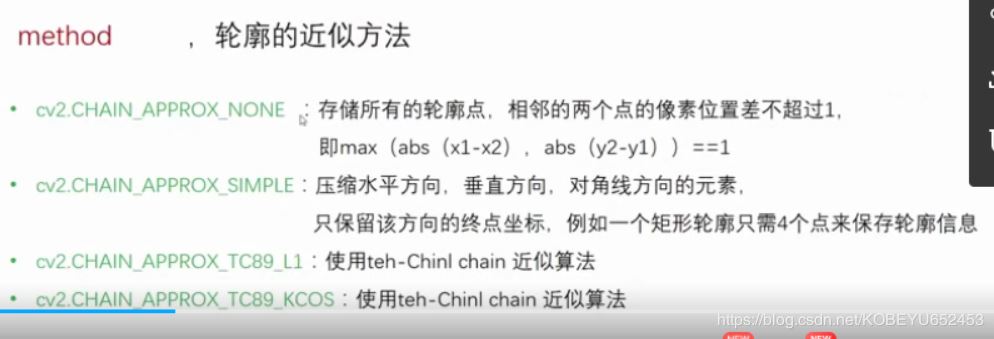
method:轮廓的近似方法
r=cv2.drawContours(image, contours, contourIdx, color[, thickness])
r:目标图像
image:原始图像
contours: 所有的输入轮廓边缘数组
contourIdx :需要绘制的边缘索引,如果全部绘制为-1。如果有多个目标,可以绘制第一个目标0,第二个目标1,第三个目标2.。。
color:绘制的颜色,为BGR格式的SCalar
thickness:可选,绘制的密度,即轮廓的画笔粗细
import cv2
import numpy as np
o = cv2.imread('lena256.bmp')
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)#BGR-灰度
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)#二值图像
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
co=o.copy()#对原始图像进行绘制
r=cv2.drawContours(co,contours,-1,(0,127,127),4)#co为复制图像,轮廓会修改原始图像
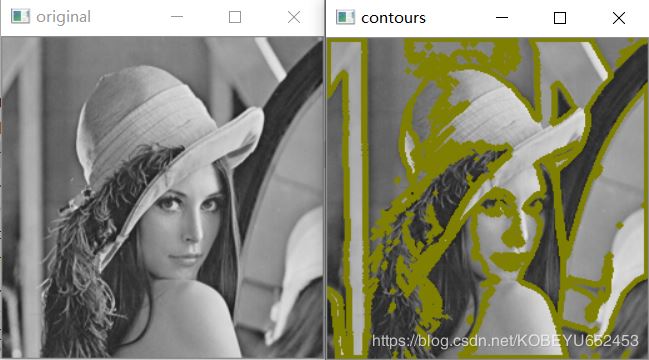
cv2.imshow("original",o)
cv2.imshow("contours",r)
cv2.waitKey()
cv2.cvtColor(input_image, flag)用于颜色空间转换。
input_image:需要转换的图像
flag:转换类型
cv2.COLOR_BGR2GRAY : BGR -灰度
cv2.COLOR_BGR2RGB:BGR-RGB
cv2.COLOR_BGR2HSV:BGR-HSV
最小外接圆
函数cv2.minEnclosingCircle() 可以帮我们找到一个对象的外切圆。它是所有能够包括对象的圆中面积最小的一个。
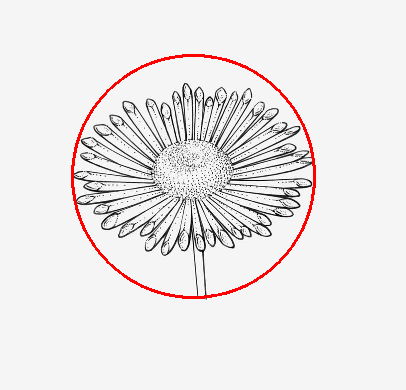
案例:现有下面这样一张图片,要求将图片中心的花朵标记出来。

代码:
import numpy as np
import cv2 as cv
img=cv.imread("image.jpg",0)
#为了显示方便,这里将图片进行缩放
x,y=img.shape
img=cv.resize(img,(y//2,x//2))
#将图片二值化,由于前景物体是黑色的,因此在二值化时采用cv.THRESH_TOZERO_INV这种方式
ret,thresh=cv.threshold(img,127,255,cv.THRESH_TOZERO_INV)
#寻找图片中的轮廓,mode=cv.RETR_EXTERNAL,这是为了寻找最外层的轮廓
im,contour,hierarchy=cv.findContours(thresh,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)
#cv.minEnclosingCircle函数的参数要求是ndarray类型,因此这里将找到的
# 轮廓中的所有的点存放在一个列表中,然后使用这个列表创建数组
point_list=[]
for i in contour:
for j in i:
point_list.append(j[0])
point_array=np.array(point_list)
#使用最小外接圆函数,返回值为这个圆的圆心坐标和圆半径长度
(x,y),radius=cv.minEnclosingCircle(point_array)
#图片上的坐标均为整数,圆的半径也要求是整数,因此将它们强制转换为int类型
center=(int(x),int(y))
color=cv.cvtColor(img,cv.COLOR_GRAY2BGR)
color=cv.circle(color,center,radius=int(radius),color=(0,0,255),thickness=2)
#显示图片
cv.imshow("color",color)
cv.waitKey(0)
cv.destroyAllWindows()
程序结果:
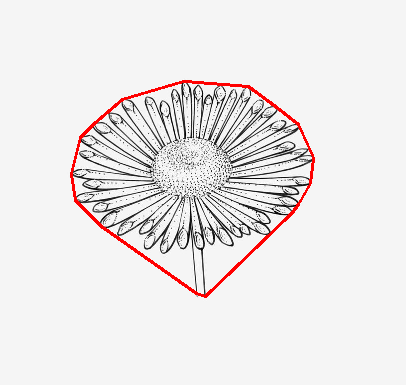
凸包
凸包与轮廓近似相似,但不同,虽然有些情况下它们给出的结果是一样的。函数cv2.convexHull() 可以用来检测一个曲线是否具有凸性缺陷,并能纠正缺陷。一般来说,凸性曲线总是凸出来的,至少是平的。在opencv中使用函数cv.convexhull来寻找轮廓的凸包,该函数的定义为:
hull=cv.convexHull( points[, hull[, clockwise[, returnPoints]]])
这个函数的参数如下:
Points:我们需要传入的轮廓
Hull:输出,通常不需要
clockwise: 取向标志,如果为True,凸包的方向是顺时针方向,否则为逆时针方向;
returnPoints: 默认为True. 它会返回凸包上点的坐标。如果设置为False,就会返回与凸包点对应的轮廓上的点。
还是上面的这副图片,我们对上面的代码稍加修改,可以得到凸包的形状,代码如下:
import numpy as np
import cv2 as cv
img=cv.imread("image.jpg",0)
#为了显示方便,这里将图片进行缩放
x,y=img.shape
img=cv.resize(img,(y//2,x//2))
#将图片二值化,由于前景物体是黑色的,因此在二值化时采用cv.THRESH_TOZERO_INV这种方式
ret,thresh=cv.threshold(img,127,255,cv.THRESH_TOZERO_INV)
#寻找图片中的轮廓,mode=cv.RETR_EXTERNAL,这是为了寻找最外层的轮廓
im,contour,hierarchy=cv.findContours(thresh,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)
#cv.minEnclosingCircle函数的参数要求是ndarray类型,因此这里将找到的
# 轮廓中的所有的点存放在一个列表中,然后使用这个列表创建数组
point_list=[]
for i in contour:
for j in i:
point_list.append(j[0])
point_array=np.array(point_list)
#寻找凸包,返回值是凸包上的点
hull=cv.convexHull(point_array,returnPoints=True)
color=cv.cvtColor(img,cv.COLOR_GRAY2BGR)
#将凸包绘制出来,需要注意的是:这里需要将凸包上点的坐标写成一个
#列表传入函数cv.ploylines,否则绘制出来的只是凸包上的一系列点
color=cv.polylines(color,[hull],True,(0,0,255),2)
#显示图片
cv.imshow("color",color)
cv.waitKey(0)
cv.destroyAllWindows()
程序运行结果为:
图像掩模和像素点
有时我们需要构成对象的所有像素点,我们可以将图像的所有轮廓提取出来,然后使用函数cv.drawContours()将轮廓内的区域填充为指定的颜色。然后使用cv.findNonZeros()函数将非零像素点的坐标提取出来,这样就得到了构成对象的像素点。我们还是在上面的图片上进行操作,代码如下:
import numpy as np
import cv2 as cv
img=cv.imread("image.jpg",0)
#为了显示方便,这里将图片进行缩放
x,y=img.shape
img=cv.resize(img,(y//2,x//2))
#将图片二值化,由于前景物体是黑色的,因此在二值化时采用cv.THRESH_TOZERO_INV这种方式
ret,thresh=cv.threshold(img,127,255,cv.THRESH_TOZERO_INV)
#寻找图片中的轮廓,mode=cv.RETR_EXTERNAL,这是为了寻找最外层的轮廓
im,contour,hierarchy=cv.findContours(thresh,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)
#创建一个填充轮廓内像素点的画板,背景颜色为黑色,这里我们使用numpy创建一个全零的二维数组
mask=np.zeros(img.shape,dtype=np.uint8)
#将参数thickness设置为-1,这样cv.drawContours函数就会将轮廓内的像素点填充为指定的颜色
mask=cv.drawContours(mask,contour,contourIdx=-1,color=(255,255,255),thickness=-1)
#寻找mask内非零像素点,将其存放为一个numpy数组
NonZeroPoints=np.array(cv.findNonZero(mask))
#形状变换,将其改变为一个二维数组,数组的每一行存放一个非零像素点的坐标
NonZeroPoints=NonZeroPoints.reshape((-1,2))
#验证我们提取出来的像素点坐标是否正确,我们使用变量
#column和row分别存放非零像素点在图像中坐标的列数和行数
column=NonZeroPoints[:,0]
row=NonZeroPoints[:,1]
#在新的画板上将这些点绘制出来,将这些坐标对应的像素点的值设为255
mask1=np.zeros(img.shape)
mask1[row,column]=255
#显示结果
cv.imshow("mask",mask)
cv.imshow("mask1",mask1)
cv.waitKey(0)
cv.destroyAllWindows()
程序运行结果:
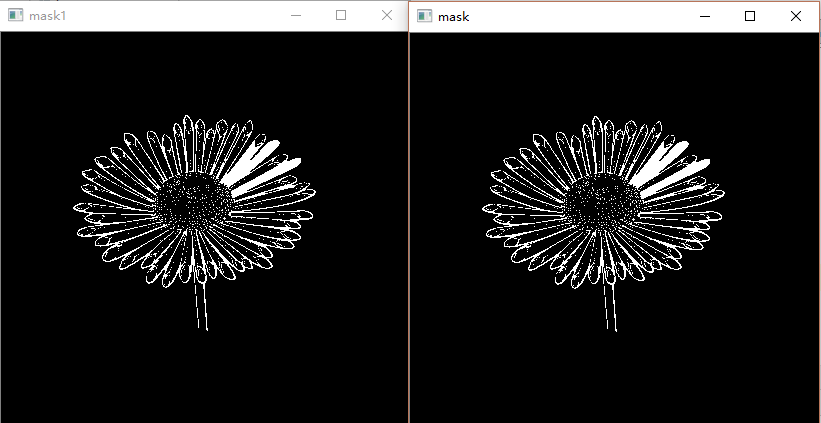
通过上面两幅图的对比结果,我们可以看到:对象的组成像素点被正确地提取出来了。
加载全部内容